Working of the Global Positioning System (GPS):
GPS or Global Positioning System is a satellite navigation system that furnishes location and time information in all climate conditions to the user. GPS is used for navigation in planes, ships, cars and trucks also. The system gives critical abilities to military and civilian users around the globe. GPS provides continuous real time, 3-dimensional positioning, navigation and timing worldwide.
GPS System Working:- The GPS system consists of three segments:
- The space segment: the GPS satellites.
- The control system, operated by the U.S. military.
- The user segment, which includes both military and civilian users and their GPS equipment.
Space Segment of GPS:
- The space segment is the number of satellites in the constellation. It comprises of 29 satellites circling the earth every 12 hours at 12,000 miles in altitude.
- The function of the space segment is utilized to route/navigation signals and to store and retransmit the route/navigation message sent by the control segment.
These transmissions are controlled by highly stable atomic clocks on the satellites. - The GPS Space Segment is formed by a satellite constellation with enough satellites to ensure that the users will have, at least, 4 simultaneous satellites in view from any point at the Earth surface at any time.
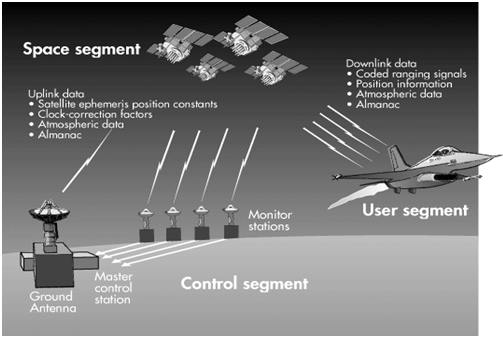
GPS Control Segment:
- The control segment comprises of a master control station and five monitor stations outfitted with atomic clocks that are spread around the globe.
- The five monitor stations monitor the GPS satellite signals and then send that qualified information to the master control station where abnormalities are revised and sent back to the GPS satellites through ground antennas. Control segment also referred as monitor station.

GPS User Segment:
- The user segment comprises of the GPS receiver, which receives the signals from the GPS satellites and determine how far away it is from each satellite.
- Mainly this segment is used for the U.S military, missile guidance systems, civilian applications for GPS in almost every field.
- Most of the civilian uses this from survey to transportation to natural resources and from there to agriculture purpose and mapping too.
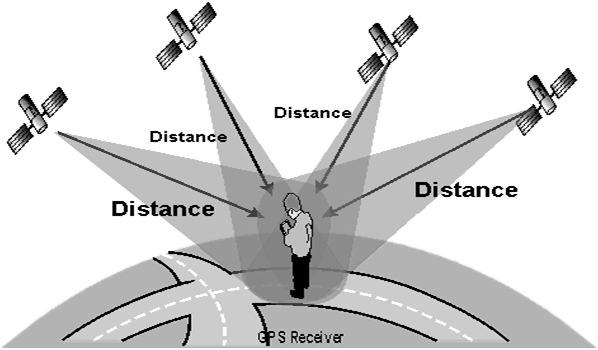
How GPS Determines a Position:
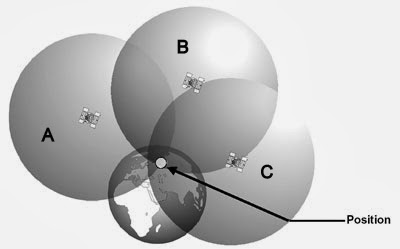
- The working/operation of Global positioning system is based on the ‘trilateration’ mathematical principle.
- The position is determined from the distance measurements to satellites. From the figure, the four satellites are used to determine the position of the receiver on the earth.
- The target location is confirmed by the 4th satellite. And three satellites are used to trace the location place.
- A fourth satellite is used to confirm the target location of each of those space vehicles. Global positioning system consists of satellite, control station and monitor station and receiver.
- The GPS receiver takes the information from the satellite and uses the method of triangulation to determine a user’s exact position.
GPS Circuit: GPS is used on some incidents in several ways, such as:
- To determine position locations; for example, you need to radio a helicopter pilot the coordinates of your position location so the pilot can pick you up.
- To navigate from one location to another; for example, you need to travel from a lookout to the fire perimeter.
- To create digitized maps; for example, you are assigned to plot the fire perimeter and hot spots.
- To determine distance between two different points.
How a GPS receiver determines the ship’s position?
Position Fixing:
- The receiver locks on to one satellite, and from this satellite it obtains the almanac of all the other satellites, and thereby selects the most suitable satellites for position fixing.
- The position obtained by the receiver is basically by determining the distances from the receiver to each of the selected satellites.
- The range measurement is achieved by measuring the propagation time from the selected satellite to the receiver.
- Not possible to precisely synchronize satellite and receiver clock hence the pseudo ranges are obtained.
- Hence an additional satellite is used to obtain the true ranges.
Equation for position fixing:-
- R = C X (t-t2)
- Range (R) of the satellite to the user.
- Where C is the velocity of the radio waves and
- (t-t2) = is the time difference (time taken for satellite signals to reach receiver.)
The satellite clock & the GPS clock may not be perfectly synchronized so this gives rise to an error in range measurement and the obtained is termed as pseudo range.
Hence, there are four unknowns i.e. latitudes, longitude, altitude (x, y, z co-ordinates) of the user as well as the user’s clock error with respect to satellite clock.
- The position of the satellite S1 (x1, y1 , z1) is known to the user by the 30 sec navigational message and from this satellite the following equation is obtained:-

- Where PR1 is the pseudo rage from satellite S1.
- (Cx Δt) is error in range measurement due to the error in the user’s clock.
- Since there are four unknown, they can be resolved from four equations obtained from four different satellites, the other 3 equations will be following:
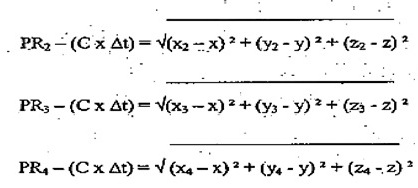
With the help of these equations the 3D-fix can be obtained. In the case of a craft floating on water, a 2-D fix (i.e. Lat & long) is required and 3 equations from 3 satellites will be sufficient to fix position.
Precise Positioning Service (PPS) of GPS:
- Authorised users have access to Precise Positioning Service.
- The L1 frequency, transmitted by all Navstar satellites, contains a course/acquisition (C/A) code ranging signal, with a navigation data message, that is available for peaceful civil, commercial, and scientific use; and a precision (P) code ranging signal with a navigation data message, that is reserved for authorized use.
- PPS predictably is 30 meters.
Standard Positioning Service (SPS) of GPS:-
- Civil Users worldwide use SPS.
- The L1 frequency, transmitted by all satellites, contains a coarse/ acquisition (C/A) code ranging signal, with a navigation data message, that is available for peaceful civil, commercial, and scientific use.
- SPS predictability Accuracy: within 35 meters.
- It is subject to selective availability, intentional down gradation of accuracy.
- Now it has been announced by US Govt, that intentional down gradation will not be done.
Errors of GPS:
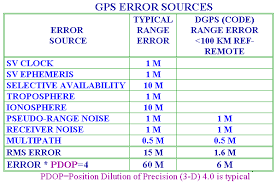
- Atmospheric Error: Changing atmospheric conditions change the speed of the GPS signals as they pass through the Earth’s atmosphere and this affects the time difference measurement and the fix will not be accurate. Each satellite transmits its message on two frequencies and hence a dual frequency receiver receives both the frequencies and correction is calculated and compensated within the receiver thus increasing the accuracy of the fix.
- Effect is minimized when the satellite is directly overhead.
- Becomes greater for satellites nearer the horizon. The receiver is designed to reject satellites with elevation less than 9.5 degrees.
- User Clock Error: If the user clock is not perfectly synchronised with the satellite clock, the range measurement will not be accurate. The range measurement along with the clock error is called pseudo range. This error can be eliminated within the receiver by obtaining pseudo range from three satellites and is done automatically within the receiver.
- Satellite Clock Error: This error is caused due to the error in the satellite’s clock w.r.t. GPS time. This is monitored by the ground based segments and any error in the satellites clock forms part of the 30 seconds navigational message.
- GDOP Error: The GDOP of a satellite determines the angle of cut which in turn governs the quality of the position obtained. Wider the angular separation between the satellites, better the accuracy of the fix. Or, conversely said, the lower the GDOP value, the greater the accuracy of the fix. The GDOP value is indicated on the display unit.
- Multipath Error: This error is caused by the satellite signals arriving at the ship’s antenna both directly from the satellite and those that get reflected by some objects. Thus two signals are received simultaneously which will cause the distortion of signal from which range measurement is obtained. Siting the antenna at a suitable place can minimize this error.
- Orbital Error: The satellites are monitored and their paths are predicted by the ground based segment. However, between two consecutive monitoring of the same satellite, there may be minor drifts from their predicted paths resulting in small position inaccuracy.
Contents of Navigation Message transmitted by the GPS satellites:
Navigation Message: Essential purpose of the navigation message transmission by satellites is to determine its position by the GPS receiver. Each satellite transmits a navigational message of 30 seconds in the form of 50 bps data frame. This data, which is different for each satellite, is previously supplied to the satellites by master control station and is divided into 5 sub-frames.
Each sub-frame commences with telemetry word (TLM) containing satellite status followed by hand over word (HOW) data for acquiring P code from C/A code.
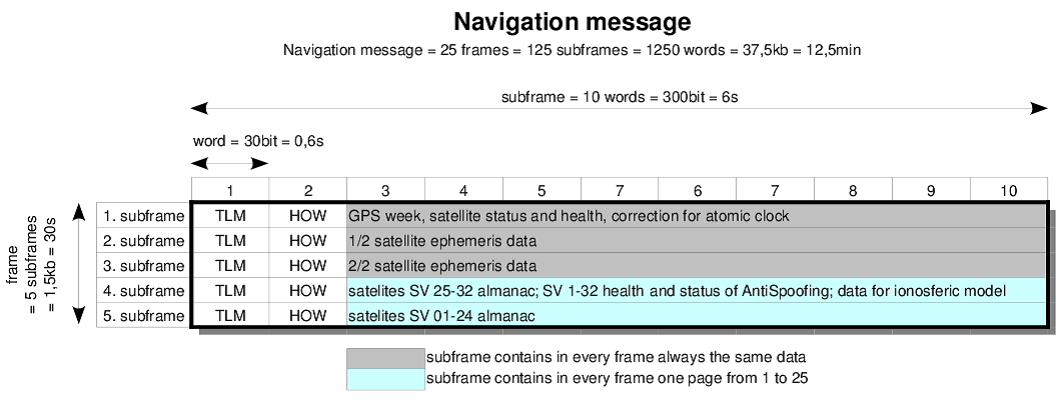
The sub-frames are:
- The 1st sub-frame contains data relating to satellite clock correction.
- The 2nd and 3rd sub-frames contain the satellite ephemeris defining the position of the satellite.
- The 4th sub-frame passes the alpha-numeric data to the user and will only be used when upload station has a need to pass specific messages.
- The 5th sub-frame gives the almanac of all the other satellites which includes the identity codes thus allowing the user the best choice of satellites for position fixing.
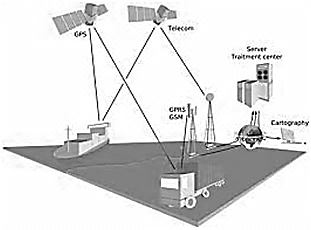
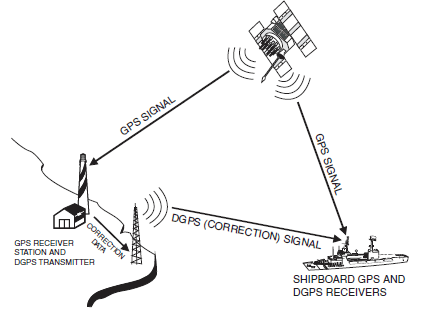
Differential GPS (DGPS) enhances the accuracy of the ship’s position:
Differential GPS (DGPS) is a system in which differences between observed and computed co-ordinates ranges (known as differential corrections) at a particular known point are transmitted to users (GPS receivers at other points) to upgrade the accuracy of the users receivers position.
Differential Correction:- Differential correction is a technique that greatly increases the accuracy of the collected DGPS data. It involves using a receiver at a known location – the “base station“ and comparing that data with DGPS positions collected from unknown locations with “roving receivers.”
Limitation & Errors of DGPS:-
- International Limitation of Accuracy
- Receiver Independent Exchange Format
- Reference System Co-ordinates
Methods used to Transmit Corrections:-
- Computing & transmitting – a position correction in terms of Lat, Long & altitude i.e. x, y, z co-ordinates.
- Computation of pseudo range correction to each satellite which is then broadcasted to the user and applied to the user’s pseudo range measurement before the position is calculated by the onboard receiver resulting in a higher accuracy of position fix.
- DGPS removes common-mode errors, those errors common to both the reference and remove receivers (not multipath or receiver noise). Errors are more often common when receivers are close together (less than 100 km). Differential position accuracies of 1-10 meters are possible with DGPS based on C/A code SPS Signal.
Explanation of how the DGPS calculate even more accurate position than the GPS:
- Differential Global Positioning System (DGPS) is an enhancement to Global Positioning System that provides improved location accuracy, from the 15-meter nominal GPS accuracy to about 10 cm in case of the best implementations.
- DGPS uses a network of fixed ground-based reference stations to broadcast the difference between the positions indicated by the GPS satellite systems and the known fixed positions.
- These stations broadcast the difference between the measured satellite pseudo ranges and actual (internally computed) pseudo ranges, and receiver stations may correct their pseudo ranges by the same amount.
- The digital correction signal is typically broadcast locally over ground-based transmitters of shorter range.
Geodetic Datum:
A geodetic datum or geodetic system is a coordinate system, and a set of reference points, used for locating places on the Earth (or similar objects). Datums are used in geodesy, navigation, and surveying by cartographers and satellite navigation systems to translate positions indicated on maps (paper or digital) to their real position on Earth. Each starts with an ellipsoid (stretched sphere), and then defines latitude, longitude and altitude coordinates. One or more locations on the Earth’s surface are chosen as anchor “base-points”.
Pseudo Range:
The Pseudo Range is the pseudo distance between a satellite and a navigation satellite receiver for instance Global Positioning System (GPS) receivers. To determine its position, a satellite navigation receiver will determine the ranges to (at least) four satellites as well as their positions at time of transmitting. Knowing the satellites’ orbital parameters, these positions can be calculated for any point in time. The Pseudo Ranges of each satellite are obtained by multiplying the speed of light by the time the signal has taken from the satellite to the receiver. As there are accuracy errors in the time measured, the term pseudo-ranges is used rather than ranges for such distances.
True Range:
True Range is an instantaneous measurement of the distance between the transmit antenna on the SV and receive antenna on the vehicle. If it were possible imagine a tape measure stretched out between the two antennas, this measurement is the true range.
Geometric Dilution of Precision (GDOP):
Explanation:-
- Dilution of precision (DOP), or geometric dilution of precision (GDOP), is a term used in satellite navigation and geomatics engineering to specify the additional multiplicative effect of navigation satellite geometry on positional measurement precision.
- DOP can be expressed as a number of separate measurements:
- HDOP – horizontal dilution of precision
- VDOP – vertical dilution of precision
- PDOP – position (3D) dilution of precision
- TDOP – time dilution of precision
- These values follow mathematically from the positions of the usable satellites. Signal receivers allow the display of these positions (skyplot) as well as the DOP values.
- The term can also be applied to other location systems that employ several geographical spaced sites. It can occur in electronic-counter-counter-measures (electronic warfare) when computing the location of enemy emitters (radar jammers and radio communications devices). Using such an interferometry technique can provide certain geometric layout where there are degrees of freedom that cannot be accounted for due to inadequate configurations.
- The effect of geometry of the satellites on position error is called geometric dilution of precision and it is roughly interpreted as ratio of position error to the range error. Imagine that a square pyramid is formed by lines joining four satellites with the receiver at the tip of the pyramid. The larger the volume of the pyramid, the better (lower) the value of GDOP; the smaller its volume, the worse (higher) the value of GDOP will be. Similarly, the greater the number of satellites, the better the value of GDOP.
HDOP with respect to GPS:
HDOP: Acronym for horizontal dilution of precision. A measure of the geometric quality of a GPS satellite configuration in the sky. HDOP is a factor in determining the relative accuracy of a horizontal position. The smaller the DOP number, the better the geometry.
GPS receiver determining the speed of the ship:
Explanation:
- The carrier frequency is also used to determine the speed of the user by the measurement of Doppler shift, i.e. change in the frequency of radio waves received when the distance between the satellite and user is changing due to the relative motion between the two.
- The position and velocity of the satellite as well as the position of the user are known to the user’s receiver.
- The velocity vector of the satellite can be resolved in two ways:
- In the direction towards the user
- In the direction perpendicular to (i).
- The 2nd component is not considered as speed in this direction will not cause Doppler shift.
- The receiver calculates the velocity vector of the satellite in the direction towards the user.
- If the relative approach speed between the satellite and the user’s speed (based on the Doppler shift measurement) is not equal to the satellite speed vector towards the user; the difference can only arise due to user’s speed towards or away from the satellite.
- Similarly with the help of the other two satellites, the receiver can calculate two additional speed vectors and these speed vectors will be towards or away from their respective satellites.
- These velocity vectors are resolved into three other vectors, i.e. x, y and z co-ordinates and with these three vectors the course and speed of the user is calculated.
GPS System configuration and frequencies used for: P & C/A code:
Codes:- Each satellite transmits two codes:-
- P Code (Precession Code) that is only available to US military and its allies.
- C/A Code (Coarse Acquisition Code) available for use to all civilian users.
Frequencies:- 1575.42 MHz (L1 signal) and 1227.6 MHz (L2 signal).
- The L1 carrier consists of both the C/A and P codes, while the L2 carrier consists the P code only.
- Each satellite transmits pseudo random noise signals on these two different frequencies.
Function of these codes is as follows:
- For satellite identification since each satellite has a unique code.
- For measurement of the propagation time from the satellite to user.
The C/A code:-
- The C/A code is different for every satellite.
- The C/A code is made up of sequences called chips.
- Sequence repeats itself every millisecond.
- The C/A code is for the civilians.
P code:-
- The full code length is of 267 days.
- The extremely long code length makes it difficult to lock on to the P code.
- P code is available only for US & allies.
- P code is different for every satellite.
Alarms of GPS on Ships:
Alarms of GPS:- There are seven alarm conditions which generate both audible and visual alarms. When an alarm setting is violated, the buzzer sounds and the name of the offending alarm appears on the display. The alarm icon also appears on the Plotter 1, Plotter 2 and Highway displays.
- Arrival Alarm, Anchor Watch Alarm:-
- Arrival alarm:- The arrival alarm informs you that own ship is approaching a destination waypoint. The area that defines an arrival zone is that of a circle which you approach from the outside of the circle.
- Anchor watch alarm:- The anchor watch alarm sounds to warn you that own ship is moving when it should be at rest.
- Cross Track Error (XTE) Alarm :- The XTE alarm warns you when own ship is off its intended course.
- Ship’s Speed Alarm:- The ship’s speed alarm sounds when ship’s speed is lower or higher (or within) the alarm range set.
- Trip Alarm:- The trip alarm sounds when the distance run is greater than the trip alarm setting.
- Water Temperature Alarm:- The water temperature alarm sounds when the water temperature is higher or lower (or within) the preset temperature. This alarm requires temperature signal from external equipment.
- Depth Alarm:- The depth temperature alarm sounds when the depth is higher or lower (or within) the preset depth. This alarm requires video sounder connection.
- WAAS/DGPS Alarm:- The WAAS/DGPS alarm sounds when the WAAS/DGPS signal is lost. This alarm may be enabled or disabled as below.
Chart Datum – Explanation:
Chart Datum (CD) is defined simply in the Glossary as the level below which soundings are given on Admiralty charts. CDs used for earlier surveys were based on arbitrary low water levels of various kinds.
Modern Admiralty surveys use as CD a level as close as possible to Lowest Astronomical Tide (LAT), which is the lowest predictable tide under average meteorological conditions. This is to conform to an IHO Technical Resolution which states that CD should be set at a level so low that the tide will not frequently fall below it.
The actual levels of LAT for Standard Ports are listed in Admiralty Tide Tables. On larger scale charts, abbreviated details showing the connection between chart datum and local land levelling datum are given in the tidal panel for the use of surveyors and engineers, where those connections are known.
Datums in use on charts:-
Large scale modern charts contain a panel giving the heights of MHWS, MHWN, MLWS and MLWN above CD, or MHHW, MLHW, MHLW and MLLW, whichever is appropriate, depending on the tidal regime in the area concerned. The definitions of all these terms are given in the Glossary. If the value of MLWS from this panel is shown as 0·0 m, CD is the same as MLWS and is not therefore based on LAT. In this case tidal levels could fall appreciably below CD on several days in a year, which happens when a CD is not based on LAT.
Other charts for which the UKHO is the charting authority are being converted to new CDs based on LAT as they are redrawn. The new datum is usually adopted in Admiralty Tide Tables about one year in advance to ensure agreement when the new charts are published. When the datum of Admiralty Tide Tables thus differs from that of a chart, a caution is inserted by Notice to Mariners on the chart affected drawing attention to the new datum.
Where foreign surveys are used for Admiralty charts, the chart datums adopted by the hydrographic authority of the country concerned are always used for Admiralty charts. This enables foreign tide tables to be used readily with Admiralty charts. In tidal waters these CDs may vary from Mean Low Water (MLW) to lowest possible low water. In non–tidal waters, such as the Baltic, CD is usually Mean Sea Level (MSL). Caution. Many CDs are above the lowest levels to which the tide can fall, even under average weather conditions. Charts therefore do not always show minimum depths.
For further details, see the relevant Admiralty Tidal Handbook.