Long Range Identification and Tracking (LRIT) system architecture Explanation:
Purpose of LRIT:-
The
Long Range Identification and Tracking (LRIT) system is a designated
International Maritime Organization (IMO) system designed to collect and
disseminate vessel position information received from IMO member States ships.
The
main purpose of the LRIT ship position reports is to enable a Contracting
Government to obtain ship identity and location information in sufficient time
to evaluate the security risk posed by a ship off its coast and to respond, if
necessary, to reduce any risks.
LRIT
has also become an essential component of SAR operations and marine environment
protection.
It
is a satellite-based, real-time reporting mechanism providing almost worldwide
coverage (Inmarsat Coverage) that allows unique visibility to position reports
of vessels that would otherwise be invisible and potentially a threat.
CARRIAGE REQUIREMENT of LRIT :- Ships in international voyages
Passenger ships
Cargo ships over 300 t
Mobile platforms
Ships
fitted with AIS and sailing in sea A1 areas do not need to transmit LRIT data.
INFORMATION TRANSMITTED in LRIT :-
Identity
(Ship’s LRIT Identifier)
Position
(Lat/Long)
Date
and time (UTC)
UPDATE INTERVAL in LRIT:-
Default
value 6 hourly
Update
interval remotely selectable
Minimum
interval 15 min
May
be switched off by the Master under certain conditions
Long Range Identification and Tracking (LRIT) system architecture
THE
LRIT SYSTEM CONSISTS OF:
The ship borne LRIT information transmitting equipment.
Communications Service Providers (CSPs).
Application Service Providers (ASPs).
LRIT Data Centres (DC), including any related Vessel Monitoring System(s) (VMSs).
The LRIT Data Distribution Plan (DDP).
The International LRIT Data Exchange (IDE),
LRIT coordinator
How does LRIT differ from AIS Explanation:
Some confuse the functions of LRIT with that of AIS (Automatic Identification System), a collision avoidance system also mandated by the IMO, which operates in the VHF radio band, with a range only slightly greater than line-of-sight.
(See AIS) While AIS was originally designed for short-range operation as a collision avoidance and navigational aid, it has now been shown to be possible to receive AIS signals by satellite in many, but not all, parts of the world. This is becoming known as S-AIS and is completely different from LRIT.
The only similarity is that AIS is also collected from space for determining location of vessels, but requires no action from the vessels themselves except they must have their AIS system turned on.
LRIT requires the active, willing participation of the vessel involved, which is, in and of itself, a very useful indication as to whether the vessel in question is a lawful actor.
Thus the information collected from the two systems, S-AIS and LRIT, are mutually complementary, and S-AIS clearly does not make LRIT superfluous in any manner.
Indeed, because of co-channel interference near densely populated or congested sea areas satellites are having a difficult time in detecting AIS from space in those areas.
Authorized receivers / users of LRIT
LRIT Data Centres:-
The
primary purposes of an LRIT Data Centre (DC) are to collect, store and make
available to authorised entities the
LRIT information transmitted by ships instructed by their administrations
to utilise the services of that DC. In carrying out these core functions, the
DC is required to ensure that LRIT data users are only provided with the LRIT
information they are entitled to receive under the terms of SOLAS Regulation
V/19.1.
In
addition, the LRIT DC acts as a “clearing house” by receiving requests for LRIT
information lodged in other DCs from its associated Administration(s) and
obtaining the data requested. Generally LRIT reports so requested will be
exchanged through the International Data Exchange.
LRIT
Data Centers are required to archive their data so that the reports can be
recovered, if required, at a later date and the activities of the DC can be
audited by the LRIT Coordinator.
LRIT
DCs may make a charge for LRIT data they provide to other DCs.
DCs
may be either National (established to provide service to only one Contracting
Government); Cooperative (established to provide services to a number of
Contracting Governments) or Regional (established to provide services to a
number of Contracting Governments acting through a regional entity of some kind).
The IMO Performance Standard envisages also an International Data Centre (IDC),
to provide LRIT services on an international basis to many countries that do
not wish to establish their own DCs, but the IMO Maritime Safety Committee
(MSC) has not yet decided to establish such an IDC.
Functions of LRIT National Data Centre
The
International LRIT Data Exchange (IDE) exists to route LRIT information between
LRIT DCs using the information provided in the LRIT Data Distribution Plan. It
is therefore connected via the internet to all LRIT DCs and the LRIT Data
Distribution Plan server.
The
IDE cannot access and does not archive the LRIT data itself, but it does
maintain a journal of message header information – which can be understood as
the “envelope” containing the LRIT information. This journal is used for
invoicing functions and for audit purposes.
The
performance of the IDE is audited by the LRIT Coordinator.
How does LRIT differ from AIS?
Explanation:-
AIS
is a broadcast system and data is available to all receiver in the receiving
range whereas LRIT is available only to the authorized person.
AIS
works on the very high frequency, whereas LRIT is based on the satellite
system.
AIS
range is limited to the VHF range but LRIT range is worldwide.
AIS
DATA is not stored by any organization whereas LRIT data is stored and
available on demand.
There
is display for AIS ON BOARD but there is no display for LRIT on board the ship.
Electronic Chart Display and Information System (ECDIS) Explanation:-
Electronic
Chart Display and information Systems (ECIDS) means a navigation information
system which with adequate back-up arrangements can be accepted as complying
with the up-to-date chart required by regulation V/20 of the 1974 SOLAS
Convention, by displaying selected information from a system electronic
navigational chart (SENC) with positional information from navigation sensors
to assist the mariner in route Monitoring, and if required display additional
navigation related information.
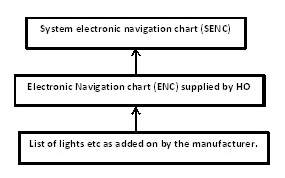
Generation of ECDIS:-
The
electronic navigation chart is the data base standardized as to content,
structure and format and is issued by the hydrographic office (HO) under the
authority of the government, the ENC contains all the chart information
necessary for safe navigation and may contain supplementary information in
addition to that contained in the paper chart (e.g. list of lights and fog
signals etc.) which may be considered necessary for safe navigation.
The
system electronic navigation chart (SENC) is the data base resulting from
transformation of the ENC by the ECDIS for appropriate use, updates to the ENC
by appropriate means and other data added by the mariner. It is the data base
that is actually accessed by the ECDIS for the display generations & other
navigational functions and is equivalent to an up-to-date paper chart.
ECDIS is basically a CPU with a monitor to display electronic chart, SENC is an integral part and below figure can be referred for better understanding which shows that SENC is interfaced with various equipment as mentioned below results in an ECDIS.
Advantages of Electronic Chart Display and Information System (ECDIS):
Availability: One of the great advantages of ECDIS over paper charts is the availability of electronic charts – especially when voyage orders are received at the last minute.
Speed and Accuracy: With ECDIS as the primary source of navigation, the Navigating Officer can plan and summarise the passage much faster than on Paper Charts. Daily reporting data such as Distance to Go, Distance Covered, Average Speed, etc. can be done quickly with hardly any effort.
Corrections: The Navigating Officer now receives weekly updates to the Electronic Charts via Email which he has to download onto a zip drive and upload them to the ECDIS. Even the dreaded T&P notices are now shown electronically on the ECDIS.
Continuous Monitoring of Vessel’s Position: The ECDIS is interfaced with both the vessel’s independent GPS transceivers, thereby making the system work even if one fails.
Anti-Grounding Alarms and Settings: The ability of the ECDIS to warn the user of approaching shallow waters make it one of the most useful equipment on the bridge.
User Determined Alarm Settings: While there are certain safety critical alarms that are ON by defaults and cannot be changed, there are a host of other alarms and warnings which may be switched on or off by the User depending on the situation.
Enhances Search and Rescue Capability onboard: Modern ECDIS units have the option of interfacing NAVTEX and EGC with the ECDIS display. Warnings and Alerts are automatically displayed on the ECDIS screen, whilst at the same time giving an audible and visual indication on the unit itself.
Cost Efficient: Although, Electronic charts are by no means cheap, they still have an edge over paper charts dollar for dollar.
Environmentally Friendly: The ECDIS does pack in a strong punch in reducing the carbon footprint of every vessel which goes paperless.
Disadvantages of Electronic Chart Display and Information System (ECDIS):
Over-Reliance: A vessel could have switched off its AIS and hence might not be displayed on the ECDIS. If the Radar Overlay is not turned on, the vessel will just not be seen on the ECDIS display. Hence, it is very critical that Navigators continue to maintain an efficient lookout and a good radar watch.
Garbage In Garbage Out (GIGO): Erroneous position inputs from the GPS or loss of GPS signal can have grave consequences with the ECDIS going in DR mode. If the alarm is missed out, the result can be disastrous.
Wrong Settings: Feeding in wrong parameters for safety critical settings such as the Safety Depths, Safety Contours etc can give a false sense of safety.
Alarm Deafness: If alarms start going off too frequently, the navigator could end up in a dangerous situation called Alarm Deafness.
System Lag: Modern ECDIS software can have a lot of data to display and with various equipment interfaced with the ECDIS, the system can slow down very easily leading to system lag.
Different Types: Different vessels will have different types of ECDIS equipment.
Anomalies: Every navigator needs to be aware of the anomalies present in that particular equipment. It could be a simple use of the SCAMIN (Scale Minimum) function or something serious where certain depths or symbols might not be visible at a particular scale or appear differently.
Information Overload: It is very easy to over feed information on the ECDIS. A lot of data which was earlier marked on charts such as position for calling Master notices to Engine Room, Echo Sounder Switch on points, Port Control VHF channels etc now have to be fed on the ECDIS.
Advantages of ECDIS over conventional Paper Charts:
Position fixing can be done at required interval without manual interference.
Continuous monitoring of the ship’s position.
When interfaced with ARPA/RADAR, target can be monitored continuously.
If two position fixing system are available, the discrepancy in two systems can be identified.
Charts can be corrected with help of CD/Online.
Passage planning can be done on ECDIS without referring to other publications.
Various alarms can be set on ECDIS.
Progress of the passage can be monitored in more disciplined manner, since other navigational data is available on ECDIS.
Various alarms can be activated to draw the attention of OOW.
The
information presented in a reliability diagram requires knowledge of past and
present hydrographic surveying practices — something most mariners neither have
nor should need. To address this, the Australian Hydrographic Service developed
a system known as “zones of confidence” that has since been adopted
internationally.
On
each nautical chart the accuracy and reliability of the information used to
compile the chart is shown on a “zone of confidence” (ZOC) diagram. Within
official electronic navigational charts (ENCs), the same information is shown
as a layer that can be switched on and off by the mariner.
ZOC
categories warn mariners which parts of the chart are based on good or poor
information and which areas should be navigated with caution. The ZOC system
consists of five quality categories for assessed data, with a sixth category
for data which has not been assessed.
The
table accompanying the ZOC diagram on each chart summarizes the meaning of the
ZOC categories.
DefineENCas applicable to ECDIS:
Electronic Navigational Chart (ENC) means the database, standardized as to content, structure and format, issued for use with ECDIS on the authority of government authorized hydrographic offices. The ENC contains all the chart information necessary for safe navigation and may contain supplementary information in addition to that contained in the paper chart (e.g. sailing directions) which may be considered necessary for safe navigation. Vector charts are an example.
Define SENC as applicable to ECDIS:
System Electronic Navigational Chart (SENC) means a database resulting from the transformation of the ENC (a vector chart) by ECDIS for appropriate use, updates to the ENC by appropriate means and other data added by the mariner. It is the database that is actually accessed by ECDIS for the display generation and other navigational functions and is the equivalent to an up-to-date paper chart. The SENC may also contain information from other sources.
Define Standard Display as applicable to ECDIS:
Standard Display means the SENC information that should be shown when a chart is first displayed on ECDIS. Depending upon the needs of the mariner, the level of the information it provides for route planning or route monitoring may be modified by the mariner.
Define Display Base as applicable to ECDIS:
Display Basemeans the level of SENC information which cannot be removed from the display, consisting of information which is required at all times in all geographic areas and all circumstances. It is not intended to be sufficient for safe navigation.
Define Vector Chart as applicable to ECDIS:
A vector chartis a digital database of all the objects (points, lines, areas, etc.) represented on a chart. Vector charts store information, such as isolated dangers, depths, depth contours, coastline features, cables and pipelines etc in separate layers which can be displayed as per the user’s requirements. Vector charts are also referred to as intelligent charts as they can be interrogated for information not displayed but stored in it’s memory.
Define Raster Chart as applicable to ECDIS:
Raster Chart data is created by scanning the information on a paper chart and storing this information in the form of pixels. Many thousands of pixels together make a flat digital image. Each pixel contains all the data for a particular point: colour, brightness etc. They are also geographically referenced which makes the raster chart identical in every way to the paper chart on which it is based. Raster charts cannot be manipulated or queried. Also referred to as the Raster Chart Display System (RCDS), the information is contained in one single layer only. Information can only be added to this type of chart.
Automatic Identification System (AIS) Explanation:
Very
simply, the Automatic Identification System is a broadcast transponder system,
operating in the VHF maritime mobile band.
It
is capable of sending information such as identification, position, course,
speed and more, to other ships and to shore. AIS operates principally on two
dedicated VHF frequencies or channels:
AIS 1 – 161.975 MHz – channel 87B (Simplex, for ship to ship)
AIS 2 – 162.025 MHz – channel 88B (Duplex for ship to shore)
AIS
uses Self-Organizing Time Division Multiple Access (SOTDMA) technology to meet
this high broadcast rate and ensure reliable ship-to-ship operation. It
normally works in an autonomous and continuous mode, regardless of whether it
is operating in the open seas, coastal or inland areas.
Although
only one radio channel is necessary, each station transmits and receives over
two radio channels to avoid interference problems and to allow channels to be
shifted without communications loss from other ships.
Each
station determines its own transmission schedule (slot), based upon data link
traffic history and knowledge of future actions by other stations.
A
position report from one AIS station fits into one of 2250 time slots
established every 60 seconds.
AIS
stations continuously synchronize themselves to each other, to avoid overlap of
slot transmissions.
Slot
selection by an AIS station is randomized within a defined interval. When a
station changes its slot assignment, it pre-announces both the new location and
the timeout for that location.
In
this way, new stations including those stations which suddenly come within
radio range close to other vessels will always be received by those vessels.
Each AIS consists
of
on VHF transmitter, two VHF TDMA receivers, one VHF DSC receiver, and a
standard marine electronic communications link to shipboard display and sensor
systems.
Working of AIS:-
AIS is fitted with two receivers, one transmitter VHF DSC receiver Standard marine electronic communication link providing the various input data.
The AIS transmission uses 9.6 kb GMSK FM over 25 or 12.5kHz channel using HDLC Packet control.
Each AIS transmits and receives over two radio channel to avoid interference problems.
Each station determines its own transmission slot based on the data link traffic history and knowledge of future actions by other stations.
Range of AIS is about 20 NM.
Limitation of AIS:-
Small
crafts may not be fitted with AIS
AIS
might have switched off on other ship
Erroneous
data might have entered
Accuracy
of data received depend on the accuracy of data transmitted
Error
in sensor’s input data,
Failure
of sensors to provide data
Cell
of vessel may be full
Precautions while using AIS in collision avoidance:-
AIS
is an additional source of navigational information. It does not replace other
navigational aids.
Should
rely solely on AIS.
Watches
must be kept as per STCW.
It
does not have any impact on the composition of watch arrangement.
Swapping
of targets.
Advantages of AIS:
AIS helps in collision avoidance with respect to situational awareness, AIS can calculate the CPA & TCPA which can be compared with ARPA.
Information regarding navigation status cane be beneficial.
By virtue of AIS vessels can be positively identified.
AIS reduced the work load associated with verbal reporting system required by the VTS.
AIS contributes to Maritime security, authorities can monitor the movement of the vessels, multiple AIS coast stations can be linked together to get the extended surveillance.
AIS can pick up targets even during heavy weather & restricted visibility especially due to rain etc.
AIS can pick up targets beyond small islands & bends.
Problem on target swap (for ARPA) will not be experienced in case of AIS.
No problem of range discrimination or bearing discrimination.
Pseudo AIS can be used to generate virtual buoys to indicate dangers.
AIS can also be installed on light houses, beacons for positive identification of these marks.
Pseudo AIS can also be used to generate target in case of SAR operations.
AIS can be used for meteorological & navigational information.
Use of AIS in collision avoidance and SAR operations:
Use of AIS in Collision avoidance: AIS has potential to significantly contribute to safety of navigation. It provides positive identification of targets fitted with AIS along with their static and dynamic information.
This enhances the
navigational effectiveness and it can greatly improve situational awareness and
decision making abilities. AIS also assists OOW in tracking and monitoring
targets, as it also provides information on CPA and TCPA.
Use of AIS in SAR operations:
SAR operations can be used for receiving messages from an AIS-SAR transmitter (SART), which have built in GPS receivers to derive accurate positioning information, on survival craft.
In combined aerial and surface searches AIS may allow the direct presentation of the position on other displays, such as radar, electronic chart systems and ECDIS.
AIS-SART facilitates the task of SAR craft in rescuing distressed seafarers.
For ships in distress without AIS, the on scene co-ordinator could create an AIS target.
Contents & broadcast intervals for each message type for a class A AIS:
A Class A AIS unit broadcasts the following information every 2 to 10 seconds while underway and every 3 minutes while at anchor at a power level of 12.5 watts.
The information broadcast includes:
MMSI number – unique reference able identification
Navigation status – not only are “at anchor” and “underway using engine“ currently defined, but “not under command” is also currently defined.
Rate of turn – right or left, 0 to 720 degrees per minute.
Speed over ground – 1/10 knot resolution from 0 to 102 knots.
Position accuracy – differential GPS or other and an indication if RAIM processing is being used Longitude – to 1/10000 minute and Latitude – to 1/10000 minute.
Course over ground – relative to true north to 1/10th degree.
True Heading – 0 to 359 degrees derived from gyro input.
Time stamp – The universal time to nearest second that this information was generated.
In addition, the Class A AIS unit broadcasts the following
information every 6 minutes:
MMSI number – same unique identification used above, links the data above to described vessel.
IMO number – unique reference able identification (related to ship’s construction).
Radio call sign – international call sign assigned to vessel, often used on voice radio.
Name – Name of ship, 20 characters are provided.
Type of ship/cargo – there is a table of possibilities that are available.
Dimensions of ship – to nearest meter.
Location on ship where reference point for position reports is located.
Type of position fixing device – various options from differential GPS to undefined.
Draught of ship – 1/10 meter to 25.5 meters [note “air-draught” is not provided].
Destination – 20 characters are provided.
Estimated time of Arrival at destination – month, day, hour, and minute in UTC.
GPS or Global Positioning System is a satellite navigation system that furnishes location and time information in all climate conditions to the user. GPS is used for navigation in planes, ships, cars and trucks also. The system gives critical abilities to military and civilian users around the globe. GPS provides continuous real time, 3-dimensional positioning, navigation and timing worldwide.
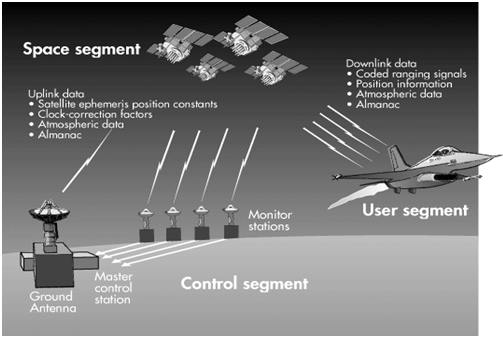
GPS System Working:- The GPS system
consists of three segments:
The space segment: the GPS satellites.
The control system, operated by the U.S. military.
The user segment, which includes both military and civilian users and their GPS equipment.
Space Segment of GPS:
The
space segment is the number of satellites in the constellation. It comprises of
29 satellites circling the earth every 12 hours at 12,000 miles in altitude.
The
function of the space segment is utilized to route/navigation signals and to
store and retransmit the route/navigation message sent by the control segment.
These transmissions are controlled by highly stable atomic clocks on the
satellites.
The
GPS Space Segment is formed by a satellite constellation with enough satellites
to ensure that the users will have, at least, 4 simultaneous satellites in view
from any point at the Earth surface at any time.
Space segment of GPS
GPS
Control Segment:
The
control segment comprises of a master control station and five monitor stations
outfitted with atomic clocks that are spread around the globe.
The
five monitor stations monitor the GPS satellite signals and then send that
qualified information to the master control station where abnormalities are
revised and sent back to the GPS satellites through ground antennas. Control
segment also referred as monitor station.
GPS User Segment:
The
user segment comprises of the GPS receiver, which receives the signals from the
GPS satellites and determine how far away it is from each satellite.
Mainly
this segment is used for the U.S military, missile guidance systems, civilian
applications for GPS in almost every field.
Most
of the civilian uses this from survey to transportation to natural resources
and from there to agriculture purpose and mapping too.
User Segment of GPS
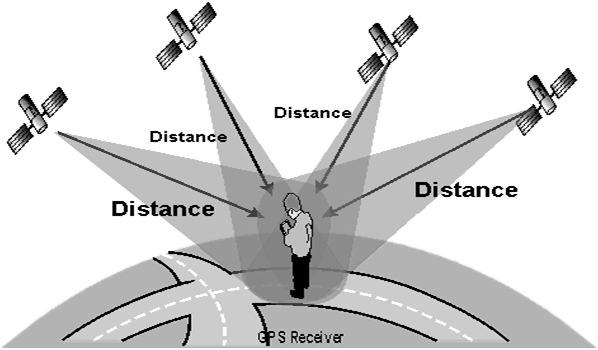
How GPS Determines a Position:
The
working/operation of Global positioning system is based on the ‘trilateration’
mathematical principle.
The
position is determined from the distance measurements to satellites. From the
figure, the four satellites are used to determine the position of the receiver
on the earth.
The
target location is confirmed by the 4th satellite. And three satellites are
used to trace the location place.
A
fourth satellite is used to confirm the target location of each of those space
vehicles. Global positioning system consists of satellite, control station and
monitor station and receiver.
The
GPS receiver takes the information from the satellite and uses the method of
triangulation to determine a user’s exact position.
GPS Circuit: GPS is used on some
incidents in several ways, such as:
To
determine position locations; for example, you need to radio a helicopter pilot
the coordinates of your position location so the pilot can pick you up.
To
navigate from one location to another; for example, you need to travel from a
lookout to the fire perimeter.
To
create digitized maps; for example, you are assigned to plot the fire perimeter
and hot spots.
To
determine distance between two different points.
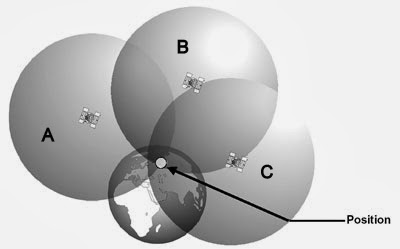
How a GPS receiver determines the ship’s position?
Position Fixing:
The
receiver locks on to one satellite, and from this satellite it obtains the
almanac of all the other satellites, and thereby selects the most suitable
satellites for position fixing.
The
position obtained by the receiver is basically by determining the distances
from the receiver to each of the selected satellites.
The
range measurement is achieved by measuring the propagation time from the
selected satellite to the receiver.
Not
possible to precisely synchronize satellite and receiver clock hence the pseudo
ranges are obtained.
Hence
an additional satellite is used to obtain the true ranges.
GPS Position Fixing of a ship
Equation
for position fixing:-
R
= C X (t-t2)
Range
(R) of the satellite to the user.
Where
C is the velocity of the radio waves and
(t-t2)
= is the time difference (time taken for satellite signals to reach receiver.)
The satellite clock
& the GPS clock may not be perfectly synchronized so this gives rise to an
error in range measurement and the obtained is termed as pseudo range.
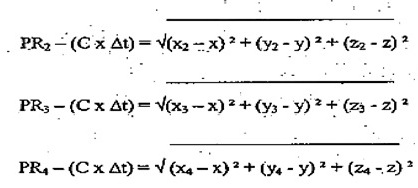
Hence, there are
four unknowns i.e. latitudes, longitude, altitude (x, y, z co-ordinates) of the
user as well as the user’s clock error with respect to satellite clock.
The
position of the satellite S1 (x1, y1 , z1) is
known to the user by the 30 sec navigational message and from this satellite
the following equation is obtained:-
Where
PR1 is the pseudo rage from satellite S1.
(C
x Δt) is error in range measurement
due to the error in the user’s clock.
Since
there are four unknown, they can be resolved from four equations obtained from
four different satellites, the other 3 equations will be following:
With the help of
these equations the 3D-fix can be obtained. In the case of a craft floating on
water, a 2-D fix (i.e. Lat & long) is required and 3 equations from 3
satellites will be sufficient to fix position.
Precise Positioning Service (PPS) of GPS:
Authorised
users have access to Precise Positioning Service.
The
L1 frequency, transmitted by all Navstar satellites, contains a
course/acquisition (C/A) code ranging signal, with a navigation data message,
that is available for peaceful civil, commercial, and scientific use; and a
precision (P) code ranging signal with a navigation data message, that is
reserved for authorized use.
PPS
predictably is 30 meters.
Standard Positioning Service (SPS) of GPS:-
Civil
Users worldwide use SPS.
The
L1 frequency, transmitted by all satellites, contains a coarse/ acquisition
(C/A) code ranging signal, with a navigation data message, that is available
for peaceful civil, commercial, and scientific use.
SPS
predictability Accuracy: within 35 meters.
It
is subject to selective availability, intentional down gradation of accuracy.
Now
it has been announced by US Govt, that intentional down gradation will not be
done.
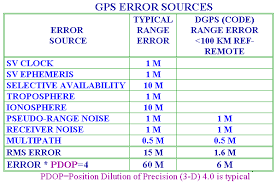
Errors of GPS:
Atmospheric Error: Changing atmospheric conditions change the speed of the GPS signals as they pass through the Earth’s atmosphere and this affects the time difference measurement and the fix will not be accurate. Each satellite transmits its message on two frequencies and hence a dual frequency receiver receives both the frequencies and correction is calculated and compensated within the receiver thus increasing the accuracy of the fix.
Effect is minimized when the satellite is directly overhead.
Becomes greater for satellites nearer the horizon. The receiver is designed to reject satellites with elevation less than 9.5 degrees.
User Clock Error: If the user clock is not perfectly synchronised with the satellite clock, the range measurement will not be accurate. The range measurement along with the clock error is called pseudo range. This error can be eliminated within the receiver by obtaining pseudo range from three satellites and is done automatically within the receiver.
Satellite Clock Error: This error is caused due to the error in the satellite’s clock w.r.t. GPS time. This is monitored by the ground based segments and any error in the satellites clock forms part of the 30 seconds navigational message.
GDOP Error: The GDOP of a satellite determines the angle of cut which in turn governs the quality of the position obtained. Wider the angular separation between the satellites, better the accuracy of the fix. Or, conversely said, the lower the GDOP value, the greater the accuracy of the fix. The GDOP value is indicated on the display unit.
Multipath Error: This error is caused by the satellite signals arriving at the ship’s antenna both directly from the satellite and those that get reflected by some objects. Thus two signals are received simultaneously which will cause the distortion of signal from which range measurement is obtained. Siting the antenna at a suitable place can minimize this error.
Orbital Error: The satellites are monitored and their paths are predicted by the ground based segment. However, between two consecutive monitoring of the same satellite, there may be minor drifts from their predicted paths resulting in small position inaccuracy.
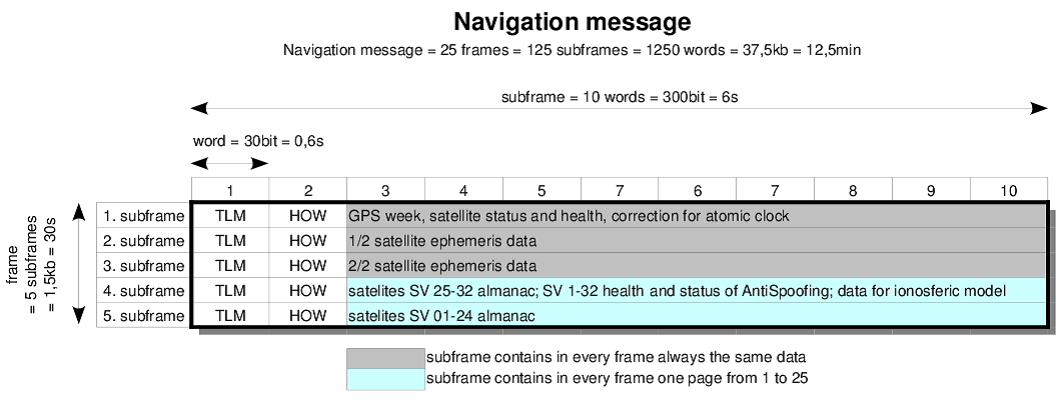
Contents of Navigation Message transmitted by the GPS satellites:
Navigation Message: Essential purpose of the navigation message transmission by satellites is to determine its position by the GPS receiver. Each satellite transmits a navigational message of 30 seconds in the form of 50 bps data frame. This data, which is different for each satellite, is previously supplied to the satellites by master control station and is divided into 5 sub-frames.
Each sub-frame commences
with telemetry word (TLM) containing satellite status followed by hand over word
(HOW) data for acquiring P code from C/A code.
Navigational Message of GPS
The sub-frames are:
The 1st sub-frame contains data relating to satellite clock correction.
The 2nd and 3rd sub-frames contain the satellite ephemeris defining the position of the satellite.
The 4th sub-frame passes the alpha-numeric data to the user and will only be used when upload station has a need to pass specific messages.
The 5th sub-frame gives the almanac of all the other satellites which includes the identity codes thus allowing the user the best choice of satellites for position fixing.
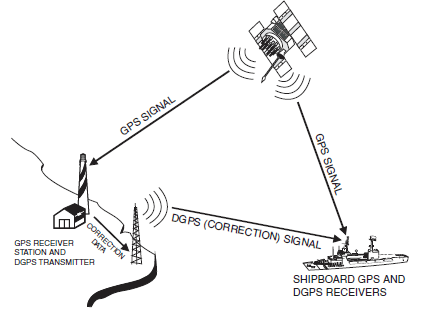
Differential GPS (DGPS) enhances the accuracy of the ship’s position:
Differential GPS (DGPS) is a system in which differences between observed and computed co-ordinates ranges (known as differential corrections) at a particular known point are transmitted to users (GPS receivers at other points) to upgrade the accuracy of the users receivers position.
Differential Correction:- Differential correction is a technique that greatly increases the accuracy of the collected DGPS data. It involves using a receiver at a known location – the “base station“ and comparing that data with DGPS positions collected from unknown locations with “roving receivers.”
Limitation & Errors of DGPS:-
International Limitation of Accuracy
Receiver Independent Exchange Format
Reference System Co-ordinates
Methods used to Transmit Corrections:-
Computing
& transmitting – a position correction in terms of Lat, Long & altitude
i.e. x, y, z co-ordinates.
Computation
of pseudo range correction to each satellite which is then broadcasted to the
user and applied to the user’s pseudo range measurement before the position is
calculated by the onboard receiver resulting in a higher accuracy of position
fix.
DGPS
removes common-mode errors, those errors common to both the reference and
remove receivers (not multipath or receiver noise). Errors are more often
common when receivers are close together (less than 100 km). Differential
position accuracies of 1-10 meters are possible with DGPS based on C/A code SPS
Signal.
Explanation of how the DGPS calculate even more accurate position than the GPS:
Differential Global Positioning System (DGPS) is an enhancement to Global Positioning System that provides improved location accuracy, from the 15-meter nominal GPS accuracy to about 10 cm in case of the best implementations.
DGPS uses a network of fixed ground-based reference stations to broadcast the difference between the positions indicated by the GPS satellite systems and the known fixed positions.
These stations broadcast the difference between the measured satellite pseudo ranges and actual (internally computed) pseudo ranges, and receiver stations may correct their pseudo ranges by the same amount.
The digital correction signal is typically broadcast locally over ground-based transmitters of shorter range.
Geodetic Datum:
A geodetic datum or geodetic system is a coordinate system, and a set of reference points, used for locating places on the Earth (or similar objects). Datums are used in geodesy, navigation, and surveying by cartographers and satellite navigation systems to translate positions indicated on maps (paper or digital) to their real position on Earth. Each starts with an ellipsoid (stretched sphere), and then defines latitude, longitude and altitude coordinates. One or more locations on the Earth’s surface are chosen as anchor “base-points”.
Pseudo Range:
The Pseudo Range is the pseudo distance between a satellite and a navigation satellite receiver for instance Global Positioning System (GPS) receivers. To determine its position, a satellite navigation receiver will determine the ranges to (at least) four satellites as well as their positions at time of transmitting. Knowing the satellites’ orbital parameters, these positions can be calculated for any point in time. The Pseudo Ranges of each satellite are obtained by multiplying the speed of light by the time the signal has taken from the satellite to the receiver. As there are accuracy errors in the time measured, the term pseudo-ranges is used rather than ranges for such distances.
True Range:
True Range is an instantaneous measurement of the distance between the transmit antenna on the SV and receive antenna on the vehicle. If it were possible imagine a tape measure stretched out between the two antennas, this measurement is the true range.
Geometric Dilution of Precision (GDOP):
Explanation:-
Dilution of precision (DOP), or geometric dilution of precision (GDOP), is a term used in satellite navigation and geomatics engineering to specify the additional multiplicative effect of navigation satellite geometry on positional measurement precision.
DOP can be expressed as a number of separate measurements:
HDOP – horizontal dilution of precision
VDOP – vertical dilution of precision
PDOP – position (3D) dilution of precision
TDOP – time dilution of precision
These values follow mathematically from the positions of the usable satellites. Signal receivers allow the display of these positions (skyplot) as well as the DOP values.
The term can also be applied to other location systems that employ several geographical spaced sites. It can occur in electronic-counter-counter-measures (electronic warfare) when computing the location of enemy emitters (radar jammers and radio communications devices). Using such an interferometry technique can provide certain geometric layout where there are degrees of freedom that cannot be accounted for due to inadequate configurations.
The effect of geometry of the satellites on position error is called geometric dilution of precision and it is roughly interpreted as ratio of position error to the range error. Imagine that a square pyramid is formed by lines joining four satellites with the receiver at the tip of the pyramid. The larger the volume of the pyramid, the better (lower) the value of GDOP; the smaller its volume, the worse (higher) the value of GDOP will be. Similarly, the greater the number of satellites, the better the value of GDOP.
HDOP with respect to GPS:
HDOP: Acronym for horizontal dilution of precision. A measure of the geometric quality of a GPS satellite configuration in the sky. HDOP is a factor in determining the relative accuracy of a horizontal position. The smaller the DOP number, the better the geometry.
GPS receiver determining the speed of the ship:
Explanation:
The carrier frequency is also used to determine the speed of the user by the measurement of Doppler shift, i.e. change in the frequency of radio waves received when the distance between the satellite and user is changing due to the relative motion between the two.
The position and velocity of the satellite as well as the position of the user are known to the user’s receiver.
The velocity vector of the satellite can be resolved in two ways:
In the direction towards the user
In the direction perpendicular to (i).
The 2nd component is not considered as speed in this direction will not cause Doppler shift.
The receiver calculates the velocity vector of the satellite in the direction towards the user.
If the relative approach speed between the satellite and the user’s speed (based on the Doppler shift measurement) is not equal to the satellite speed vector towards the user; the difference can only arise due to user’s speed towards or away from the satellite.
Similarly with the help of the other two satellites, the receiver can calculate two additional speed vectors and these speed vectors will be towards or away from their respective satellites.
These velocity vectors are resolved into three other vectors, i.e. x, y and z co-ordinates and with these three vectors the course and speed of the user is calculated.
GPS System configuration and frequencies used for: P & C/A code:
Codes:- Each satellite transmits two codes:-
P Code (Precession
Code)
that is only available to US military and its allies.
C/A Code (Coarse
Acquisition Code) available
for use to all civilian users.
Frequencies:- 1575.42 MHz (L1
signal) and 1227.6 MHz (L2 signal).
The
L1 carrier consists of both the C/A and P codes, while the L2 carrier consists the P code only.
Each
satellite transmits pseudo random noise signals on these two different
frequencies.
Function of these codes is as follows:
For
satellite identification since each satellite has a unique code.
For
measurement of the propagation time from the satellite to user.
The
C/A code:-
The
C/A code is different for every satellite.
The
C/A code is made up of sequences called chips.
Sequence
repeats itself every millisecond.
The
C/A code is for the civilians.
P
code:-
The
full code length is of 267 days.
The
extremely long code length makes it difficult to lock on to the P code.
P
code is available only for US & allies.
P
code is different for every satellite.
Alarms of GPS on Ships:
Alarms of GPS:- There are seven alarm conditions which generate both audible and visual alarms. When an alarm setting is violated, the buzzer sounds and the name of the offending alarm appears on the display. The alarm icon also appears on the Plotter 1, Plotter 2 and Highway displays.
Arrival Alarm, Anchor Watch Alarm:-
Arrival alarm:- The arrival alarm informs you that own ship is approaching a destination waypoint. The area that defines an arrival zone is that of a circle which you approach from the outside of the circle.
Anchor watch alarm:- The anchor watch alarm sounds to warn you that own ship is moving when it should be at rest.
Cross Track Error (XTE) Alarm :- The XTE alarm warns you when own ship is off its intended course.
Ship’s Speed Alarm:- The ship’s speed alarm sounds when ship’s speed is lower or higher (or within) the alarm range set.
Trip Alarm:- The trip alarm sounds when the distance run is greater than the trip alarm setting.
Water Temperature Alarm:- The water temperature alarm sounds when the water temperature is higher or lower (or within) the preset temperature. This alarm requires temperature signal from external equipment.
Depth Alarm:- The depth temperature alarm sounds when the depth is higher or lower (or within) the preset depth. This alarm requires video sounder connection.
WAAS/DGPS Alarm:- The WAAS/DGPS alarm sounds when the WAAS/DGPS signal is lost. This alarm may be enabled or disabled as below.
Chart Datum – Explanation:
Chart Datum (CD) is defined simply in the Glossary as the level below which soundings are given on Admiralty charts. CDs used for earlier surveys were based on arbitrary low water levels of various kinds.
Modern Admiralty surveys use as CD a level as close as possible to Lowest Astronomical Tide (LAT), which is the lowest predictable tide under average meteorological conditions. This is to conform to an IHO Technical Resolution which states that CD should be set at a level so low that the tide will not frequently fall below it.
The actual levels of LAT for Standard Ports are listed in Admiralty Tide Tables. On larger scale charts, abbreviated details showing the connection between chart datum and local land levelling datum are given in the tidal panel for the use of surveyors and engineers, where those connections are known.
Datums in use on charts:-
Large scale modern charts contain a panel giving the heights of MHWS, MHWN, MLWS and MLWN above CD, or MHHW, MLHW, MHLW and MLLW, whichever is appropriate, depending on the tidal regime in the area concerned. The definitions of all these terms are given in the Glossary. If the value of MLWS from this panel is shown as 0·0 m, CD is the same as MLWS and is not therefore based on LAT. In this case tidal levels could fall appreciably below CD on several days in a year, which happens when a CD is not based on LAT.
Other charts for which the UKHO is the charting authority are being converted to new CDs based on LAT as they are redrawn. The new datum is usually adopted in Admiralty Tide Tables about one year in advance to ensure agreement when the new charts are published. When the datum of Admiralty Tide Tables thus differs from that of a chart, a caution is inserted by Notice to Mariners on the chart affected drawing attention to the new datum.
Where foreign surveys are used for Admiralty charts, the chart datums adopted by the hydrographic authority of the country concerned are always used for Admiralty charts. This enables foreign tide tables to be used readily with Admiralty charts. In tidal waters these CDs may vary from Mean Low Water (MLW) to lowest possible low water. In non–tidal waters, such as the Baltic, CD is usually Mean Sea Level (MSL). Caution. Many CDs are above the lowest levels to which the tide can fall, even under average weather conditions. Charts therefore do not always show minimum depths.
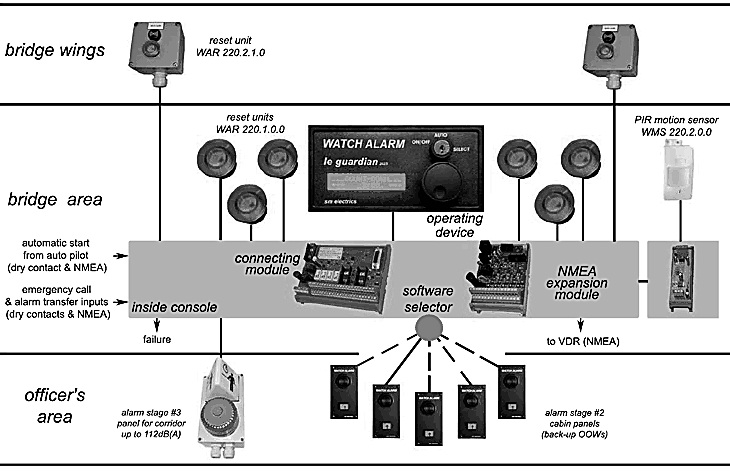
The
purpose of a bridge navigational watch alarm system is to monitor bridge
activity and detect operator disability which could lead to marine accidents.
The
system monitors awareness of the Officer of the Watch (OOW) and automatically
alerts the Master or another qualified person if, for any reason, the OOW
becomes incapable of performing OOW duties.
This
purpose is achieved by series of indications and alarm to alert first the OOW
and, if he is not responding, then to alert Master or another qualified person.
Additionally,
the BNWAS provides the OOW with means of calling for immediate assistance if
required.
Operational Modes of BNWAS:-
BNWAS should
incorporate the following 3 operational modes:
Automatic
Manual ‘ON’
Manual ‘OFF’
Automatic: The BNWAS is automatically activated when the vessel is navigating by means of heading or track control system (autopilot / trackpilot) and inhibited when this system is deactivated.
Manual ON: The BNWAS is always in operation.
Authorized person (Master) switches on system by single turning the key-switch to position “ON/OFF”.
Once dormant period (3 min, 9 min, 12 min) is set, the authorized person pulls out the key.
Dormant period starts from the moment the system has been switched on.
Manual OFF: The BNWAS is turned off completely.
ALERT SEQUENCE: – If dormant period is over without the OOW resetting,
the system activates all reset units by flash light.
ALERT STAGE 1:- If dormant period and flash light period (15 sec) are
over and the OOW has not yet resetted the button, the system activates
electronic buzzer on terminal board as well as additional buzzers located on
the bridge and wing area.
ALERT STAGE 2:- If dormant period, flash light period (15 sec) and alert stage 1 (15 sec) are over without OOW’s reset, system activates further alert via optic / acoustic alarm devices in officer’s area (cabins or staircase) as well as for VDR link.
ALERT STAGE 3:- If dormant period, flash light period (15 sec), alert
stage 1 (15 sec) and alert stage 2 (90 sec) are over without OOW’s reset, the
system activates the General Alarm as well as for VDR link.
EMERGENCY CALL:-
The OOW generates
an emergency call by pushing any reset unit longer than 5 sec.
That immediately
activates alert stage 2 and subsequently alarm stage 3.
After emergency
call has been released, reset is possible by pushing a reset unit.
Requirements of BNWAS:-
The bridge
navigational watch alarm system shall be in operation whenever the ship is
underway at sea.
System is powered
by ships main power and MUST have a battery back up giving a minimum of 6 hours
usage.
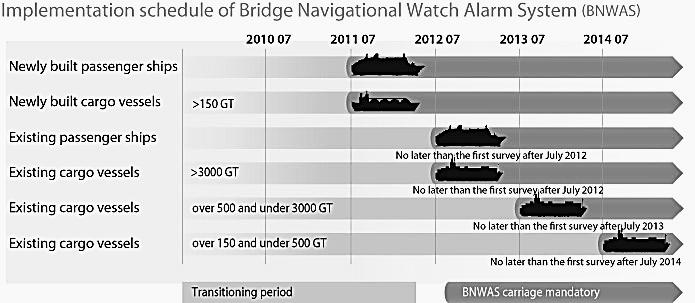
Carriage Requirements of Bridge Navigational Watch Alarm System (BNWAS):-
Cargo ships of 150 grt and upwards and passenger ships
irrespective of size constructed on or after 1 July 2011;
Passenger ships irrespective of size constructed before 1 July 2011, not
later than the first survey after 1 July 2012;
Cargo ships of 3000 grt and upwards constructed before
1 July 2011, not later than the first survey after 1 July 2012;
Cargo ships of 500 grt and upwards but less than 3000
grt constructed before 1 July 2011, not later than the first survey after 1
July 2013; and
Cargo ships of 150 grt and upwards but less than 500
grt constructed before 1 July 2011, not later than the first survey after 1
July 2014.
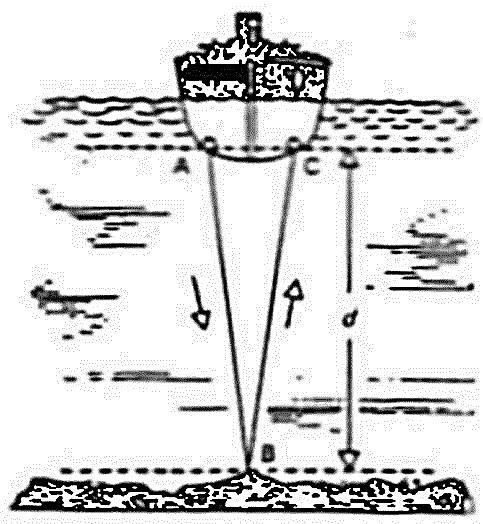
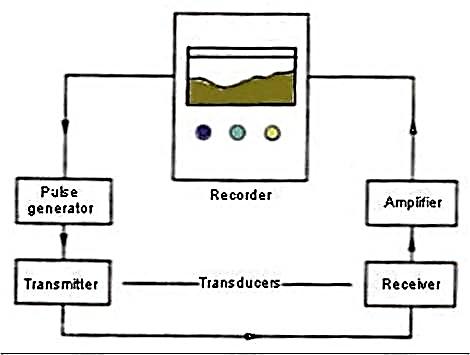
Short pulses of sound vibrations are
transmitted from the bottom of the ship to the seabed. These sound waves are
reflected back by the seabed and the time taken from transmission to reception
of the reflected sound waves is measured. Since the speed of sound in water is
about 1500 m/sec, the depth of the sea bed is calculated which will be half the
distance travelled by the sound waves.
Principles of Echo Sounder
The received echoes are converted into
electrical signal by the receiving transducer and after passing through to
stylus which burns out the coating of the thin layer of aluminum powder and
produces the black mark on the paper indicating the depth of seabed.
Components of Echo Sounder:
Components of Echo Sounder
Basically
an echo sounder has following components:
Transducer
– to generate the sound vibrations and also receive the reflected sound
vibration.
Pulse
generator – to produce electrical oscillations for the transmitting transducer.
Amplifier
– to amplify the weak electrical oscillations that has been generated by the
receiving transducer on reception of the reflected sound vibration.
Recorder
– for measuring and indicating depth.
CONTROLS:-
An
echo sounder will normally have the following controls:
Range
Switch – to select the range between which the depth is be checked e.g. 0- 50 m, 1 – 100 m, 100 – 200 m etc. Always check the lowest range first before
shifting to a higher range.
Unit
selector switch – to select the unit feet, fathoms or meter as required.
Gain
switch – to be adjusted such that the clearest echo line is recorded on the
paper.
Paper
speed control – to select the speed of the paper – usually two speeds
available.
Zero
Adjustment or Draught setting control – the echo sounder will normally display
the depth below the keel. This switch
can be used to feed the ship’s draught such that the echo sounder will display
the total sea depth. This switch is also
used to adjust the start of the transmission of the sound pulse to be in line
with the zero of the scale in use.
Fix
or event marker – this button is used to draw a line on the paper as a mark to
indicate certain time e.g. passing a navigational mark, when a position is
plotted on the chart etc.
Transducer
changeover switch – in case vessel has more than one switch e.g. forward and
aft transducer.
Dimmer
– to illuminate the display as required.
Working:
The
acoustic pulses of very short duration are transmitted vertically at the rate
of 5 to 600 pulses per minute having a beam width of 12 to 25°.
These
pulses strike the seabed and get reflected back towards the receiving
transducer as echoes.
These
received echoes are converted into electrical signals by the receiving
transducer and after passing through the different stages of the receiver, the
current is supplied to the stylus which bums out the coating of the thin layer
of aluminium powder and produces a black mark on the paper indicating the depth
of the seabed.
Principle used in the working of an Echo
Sounder:-
There are two
techniques:-
Ranging
Phasing
Ranging:-
In
echo sounder the stylus is mounted on circular belt driven by means of a stylus
motor which moves at certain speed and transmission takes place when the stylus
passes the zero marks.
A
magnet fixed on the stylus belt triggers the transmitter to transmit a pulse
every rotation of belt when stylus is at zero mark on the paper scale, the
transmission of the acoustic waves from the transducer is synchronized with the
stylus at the zero mark.
The
acoustic waves are reflected from the seabed and echoes are received by the
transducer and after passing through various stages eventually the current is
supplied to stylus which burns out the coating of the thin layer of aluminum
powder and produces the black mark on the paper indicating the depth of seabed.
This
cycle is repeated for every rotation so as the paper is pulled across the
display, the profile of seabed is obtained.
Suppose
the lowest range scale is 0 to 50 M, the transmission will take place when
stylus reaches at the zero mark.
When
the higher range is selected say 0 to 100 M, in order to cater for this range
scale, the speed of the stylus motor is reduced, in this process the scale
magnification is lost and as we switch over to higher ranges the scale becomes
more & more congested.
To
overcome this problem some of echo sounding machines work on phasing technique.
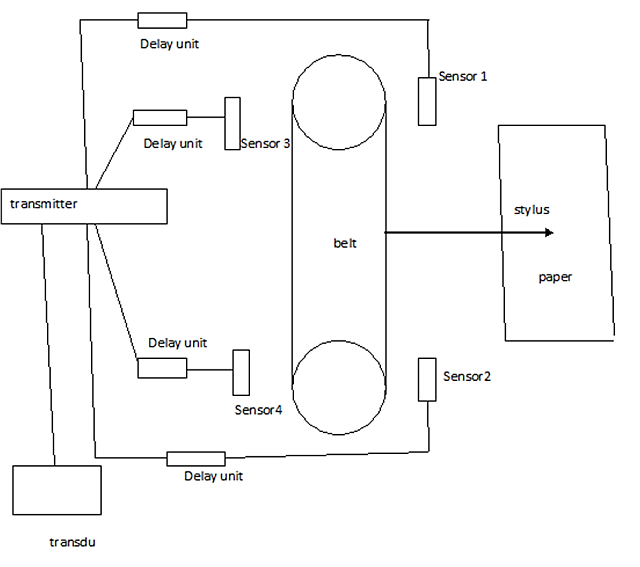
Phasing:-
In
phasing the speed of the stylus motor remains constant.
Instead
of changing the speed of the stylus, the transmission point is advanced.
If
the first range is 0 to 50 M the second range will be 50 to 100 M (instead of 0
to 100 M).
Various
sensors are positioned around the stylus belt, the magnet generates the pulse
when it passes the sensors which in turns activates the transmitter.
In
the below diagram, when we select the lowest range i.e. 0 to 50 M, the magnet
mounted on the stylus belt will activate sensor no. 1, transmission takes place
when the stylus exactly passes over the zero mark, when we switch over to
higher range, say 50 to 100 M, the magnet mounted on the stylus belt will
activate sensor no.2 and transmission will take place early, at the time of the
transmission, the stylus will not be passing over 50 M mark on display unit, in
other words there will be delay introduced by delay unit no.2 & the stylus
will reach the 50 M on display unit after delay of 0.067 seconds. (50 x 2 /
1500, where 50 correspond to the range, multiplied by 2 because double of
distance is covered by acoustic waves & the echoes and 1500 is the speed of
acoustic waves).
Likewise,
when we switch over to higher range say, 100 to 150 M, magnet mounted on the
stylus belt will activate sensor no. 3 & more delay will be introduced for
the stylus to pass over the 100 M.
Working of an Echo Sounder
Caution
when using phasing technique: – We must always start sounding at lowest
range and check for echoes, adjust the gain control if required and then only
switch over to higher range.
Errors of Echo Sounder:
Velocity of propagation in water:- The velocity changes with temperature salinity & pressure. The velocity of the acoustic wave assumed at the temperature of 16 degree C & Salinity of 3.4% is 1505 m/sec, but generally it is taken as 1500 m/sec for calculations. As velocity is varying hence depth recorded will be erroneous. Depth indicated in Fresh water can be about 3% higher than the actual depth. NP 139 can be referred in order to obtain the corrections. To compensate the error due to temperature variation, a component called “thermistor” may be mounted near the transducer & change in velocity of the acoustic wave through water from the standard value due to the change in sea water temperature is accounted for. Error due to pressure is not so significant.
Stylus speed error:- The speed of the stylus is such that the time taken by the stylus to travel from top to bottom on chart is same as the time taken by sound waves to travel twice the range selected, but due to fluctuation in voltage supplied to stylus motor, will cause error in the recorded depth.
Pythagoras error:- This error is found when two transducers are used, one for transmission and the other one for reception. This error is calculated using the Pythagoras principle. This error becomes prominent whenever distance between two transducer is more than 2 mtrs, manual should be referred in order to use the table for corrections.
Multiple echoes:- The echo may be reflected no. of times from the bottom of the sea bed, hence providing the multiple depth marks on paper.
The thermal and density layers:- The density of the water varies with temperature and salinity, which all tends to form different layers. The sound wave may be reflected from these layers.
Zero line adjustment error:- If the zero is not adjusted properly, it will give error in reading.
Cross noise:- If sensitivity of the amplifier is high, just after zero marking a narrow line along with the several irregular dots and dashes appear and this is called cross noise. The main reasons for the cross noise are aeration and picking up the transmitted pulse. If intensity of cross noise is high, it will completely mask the shallow water depths. This is controlled by swept gain control circuit.
Aeration:- When the sound wave is reflected from the reflected from the air bubbles, it will appear as dots, this is known as aeration.
Aeration can be due to pockets of bubble due to heavy weather.
Rudder hard over causing drastic alteration of course.
Pitching in light condition.
Whilst astern propulsion. (Switch over to forward transducer if available.)
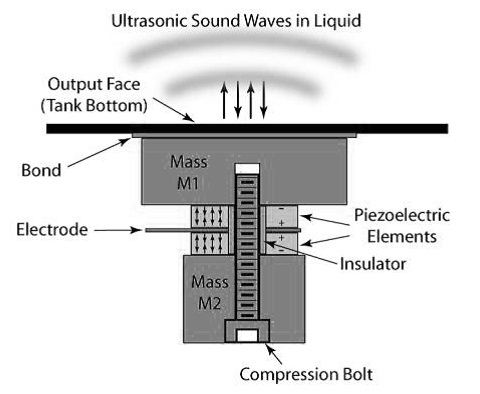
Electrostrictive Transducer with respect to Echo Sounder:
This
type of transducer works on the basic principle of piezo-electric effect, i.e.,
certain crystals such as quartz, have a property that when pressure is applied
to the two opposite faces, a difference of potential is created which is
proportional to the applied pressure or when an alternating voltage is applied,
the crystals start vibrating or oscillating. This type of transducer is also
known as Piezostrictive transducer.
The
electrostrictive transducer uses the property of a crystal for transmission and
reception of acoustic waves in water. The crystal is firmly fixed between two
steel plates so that they act as a single unit.
The
purpose of the steel plates is to provide solid and robust housing for the
crystal as well as a suitable contact surface for seawater.
When
an alternating voltage is applied between the steel plates, the quartz and the
steel plates start vibrating together. The vibration will be of very high
amplitude, if the frequency of the alternating voltage is equal to the
resonance frequency of the crystal. The lower of the two steel plates is in
direct contact with the water, which will cause the vibration in the seawater.
The vibration is always perpendicular to the plate and hence always kept
horizontally.
Generally
only one transducer is used for transmission and reception of the signals and
this transducer is always mounted as pierced hull.
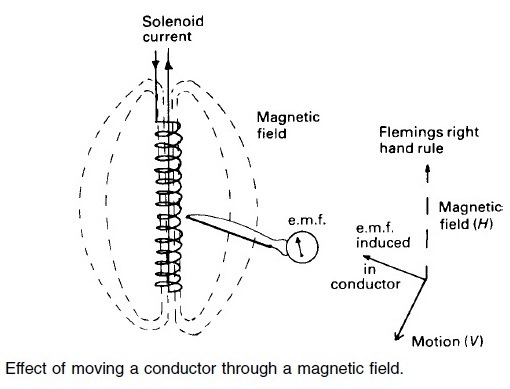
The electromagnetic speed log is based is upon the induction law, which states that if a conductor moves across a magnetic field, an electro motive force (e.m.f.) is set up in the conductor.
Alternatively, the e.m.f. will also be induced if the conductor remains stationary and the magnetic field is moved with respect to it.
The induced e.m.f. is directly proportional to the velocity.
Velocity when integrated with time gives distance
The induced e.m.f. ‘E’ is given by the following:
E = F X L X V
Where F = magnetic field
L = the length of the conductor
V = the velocity of the conductor through the magnetic field.
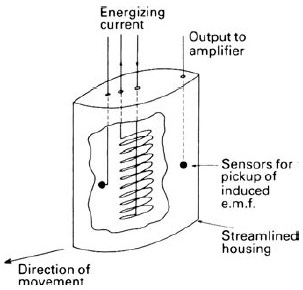
Constructional Details of an electromagnetic log sensor: This type of log consists of
Sensor
Amplifier
Indicator
Working of Electromagnetic Speed Log:
An
Electromagnet consisting of a coil carrying alternative Current (A.C.)
generates a vertical magnetic field in the water around the probe.
The
SW Conductor moving horizontally through this magnetic field has an
electromotive force induced into it proportional to the seed of the vessel. In
the EM log the ‘F’ and ‘L’ are maintained constant, therefore the induced
e.m.f. is directly proportional to the velocity ‘V’, which is the velocity
of the vessel through the water.
The
speed output from an EM log depends upon the water flow by way of the sensors.
This
type of log can give only speed through water and is greatly affected by the
current flowing under the ship.
The
induced e.m.f. and hence the speed indication will vary with the conductivity
of the water.
This
e.m.f. is picked up by 2 electrodes.
This
induced e.m.f. is very small hence the amplification is required.
The
amplified signal thus drives the mechanism which is connected to indicator.
Hence,
the induced e.m.f. which is directly proportional to the velocity is finally
displayed on the indicator.
More information:-
The
Log Extends up to about 20 cm outside the hull.
It
should be retracted in case of reduced UKC & before proceeding to dry dock.
Normally
retracted from the engine room.
If
sensors are also fitted athwartship, the speed in athwartship direction also
can be displayed.
Errors / Limitations of Electromagnetic Speed Log:
Siting of the probe is critical. This is so since if too close to the hull then due to the non-linearity of the hull form the speed of the water flow may give a wrong representation of the vessels speed. This is minimized by careful siting of the sensor as well as by calibrating the instrument while installation.
Pitching and Rollingalso give rise to errors however these are reduced by having an electrical time constant that is longer than a period of vessel motion. A well-adjusted log can have an accuracy of better than 0.1 percent of the speed range.
Sign of Speed, it can show astern speed as well, but without sign if AC current is used, if DC current is used to create the magnetic field it will show sign of speed range. This type of log can give only speed through water and is greatly affected by the current flowing under the ship.
While navigating in area with greater current, one must exercise precautions.
Advantagesof Electro-magnetic log with Doppler log:
No
moving parts
Less
affected by sea growth than Pit sword
Disadvantagesof Electro-magnetic log with Doppler log:
Salinity
and temperature of water affects calibration.
Measurements
affected by boundary layer, (water speed slowed down close to the hull by
friction).
Provides
boat/ship speed relative to water not ground. Current affects accuracy.
Difference between “Water Track Speed” and “Ground Track Speed“:
Water Track Speed:- In open seas, the sound pulse from the Doppler transducer may not reach the bottom, but get totally internally reflected from a layer of water in between. This is known as the echo from the ‘Water Track”. When the sound is bounced off a water layer, called a water track, speed indicated is the ‘Speed through Water”. or from a layer of water and the echo is at a higher frequency. The frequency of the echo from the water track will follow the same Doppler principles as the echo from the bottom track. However, the speed measured from the ‘water Track’ will not be ‘Speed over the Ground’, but it will be ‘Speed through Water’.
Ground Track Speed:- Speed over ground is the speed of the ship with respect to the ground or any other fixed object such as fixed buoy or island. Speed through water is the speed of the ship with respect to the water such as anything floating on water. A ship with her engine stopped in water with 2 knots currents will have zero speed through water but will have 2 knots speed over ground.
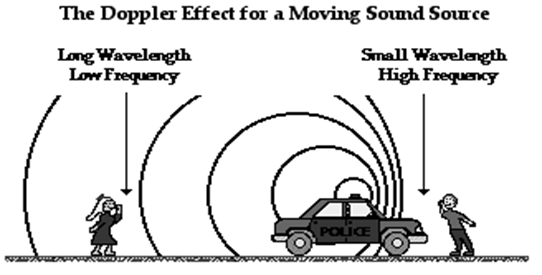
The
Doppler log is based on measurement of the Doppler effect.
The
Doppler effect can be observed for any type of wave – water wave, sound wave,
light wave, etc. we are most familiar with the Doppler effect because of our
experiences with sound waves. For instance, a police car or emergency vehicle
was travelling towards us on the highway. As the car approached with its siren
blasting, the pitch of the siren sound (a measure of the siren’s frequency) was
high; and then suddenly after the car passed by, the pitch off the siren sound
was low. That was the Doppler Effect – an apparent shift in frequency for a
sound wave produced by a moving source.
The Doppler Effect is a frequency shift that results
from relative motion between a frequency source and a listener.
If
both source and listener are not moving with respect to each other (although
both may be moving at the same speed in the same direction), no Doppler
shift will take place.
If
the source and listener are moving closer to each other, the listener will
perceive a higher frequency – the faster the source or receiver is
approaching the higher the Doppler shift.
If
the source and listener are getting further apart, the listener will perceive a
lower frequency – the faster the source or receiver is moving away the lower
the frequency.
So,
the Doppler shift is directly proportional to speed between source and
listener, frequency of the source, and the speed the wave travels.
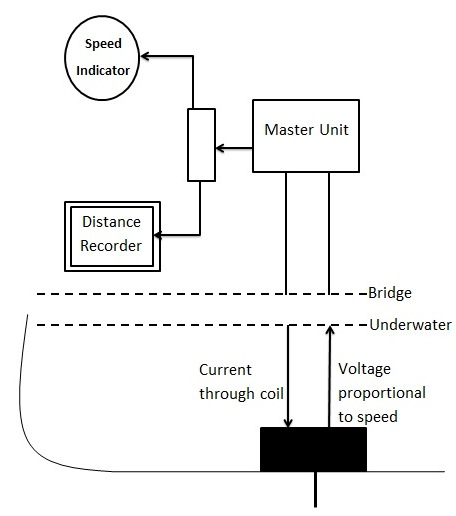
Explanation of how ship’s speed is transmitted to remote displays:
Distance recording is achieved by using a constant speed motor (10) which drives the distance counter (11), via friction gearing.
The constant speed motor has been used in order that a distance indication may be produced that is independent of the non-linear characteristic of the system.
The motor is started by contact (5) as previously described.
The main shaft (7), whose angle of rotation is directly proportional to the speed of the ship, is fitted with a screw spindle (12).
The rotation of the shaft causes a lateral displacement of the friction wheel (13). At zero speed, the friction wheel rests against the apex of the distance cone (14), whilst at maximum speed the wheel has been displaced along the cone to the rim.
The distance indicator (11) is driven from the constant speed motor (10) via the cone.
The nearer to the rim of the cone the friction wheel rides, the greater will be the distance indication.
Revolutions of the distance shaft (15) are transmitted to the remote distance indicator via the servo transmission system (16 and 17).
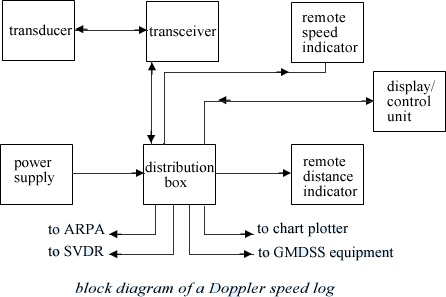
The speed unit provides the following outputs to drive both speed and distance counters:-
An analogue voltage, the gradient of which is 0.1 V/knot, to drive the potentiometer servo-type speed indicators.
A pulse frequency proportional to speed.
The frequency is 200/36 pulses/s/knot. Pulses are gated into the digital counter by a 1.8-s gate pulse.
A positive/negative voltage level to set the ahead/astern indication or the B track/W track indication.
2000 pulses per nautical mile to drive the stepping motor in the digital distance indicator.
FORMULAof Doppler Log:-
Doppler effect can be further explained by following equations:
fr is the frequency received by observer.
ft is the transmitted frequency.
c is the speed of sound.
vO is Velocity of observer
vg is Velocity of source
If the source moves towards stationary observer, fr = c ft / (c – vg)
If the source moves away stationary observer, fr = c ft / (c + vg)
If the observer moves towards stationary source, fr = ft (c + vg) / c
If the observer moves away from stationary observer, fr = ft (c – vg) / c
If the observer & source moves away from each other, fr = ft (c – vg) / (c + vs)
If the observer & source moves toward each other, fr = ft (c + vg) / (c – vs)
Since,
in the case of the Doppler log, the source & observer are the same.
Hence,
vO is
equal to vS, is equal to v
fr = ft (c+ v) / (c – v)
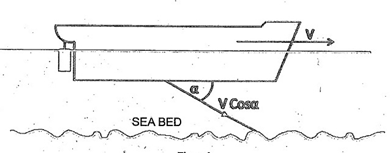
fr =
ft (c+ v cos a) / (c – v cos a)
After Further
simplification
v = c (fr – ft) / 2 ft cos a
Given
a propogation angle of 60O, cos a = 0.5 (using single transducer
facing forward)
Graphs
of speed error caused by variations of the vessel’s trim:
It
follows that if the angle changes, the speed calculated will be in error
because the angle of propagation has been applied to the speed calculation
formula in this way. If the vessel is not in correct trim (or pitching in heavy
weather) the longitudinal parameters will change and the speed indicated will
be in error.
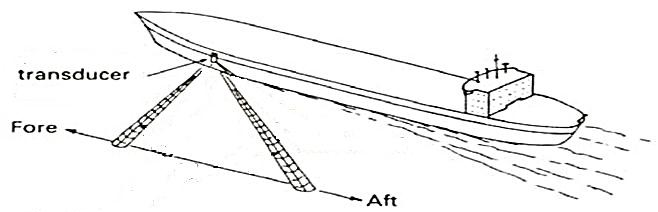
To
counteract this effect to some extent, two acoustic beams are transmitted, one
ahead and one astern. The transducer assembly used for this type of
transmission is called a ‘Janus’ configuration after the Roman god who
reputedly possessed two faces and was able to see into both the future and the
past.
After installing
transducer facing aft, the Doppler frequency shift formula now becomes:-
Frt
– fra – 4 vft
cos a / c
Hence, v = c (frt
– fra) / 4 ft cos a
Therefore
the transmission angle can effectively be ignored.
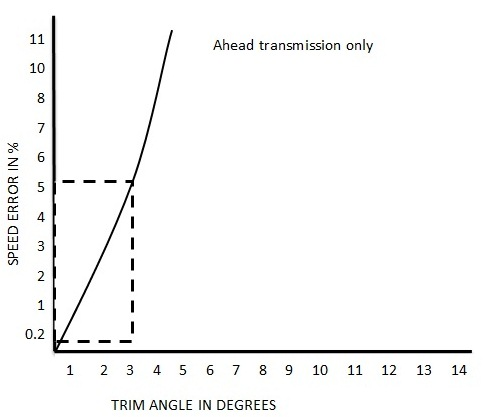
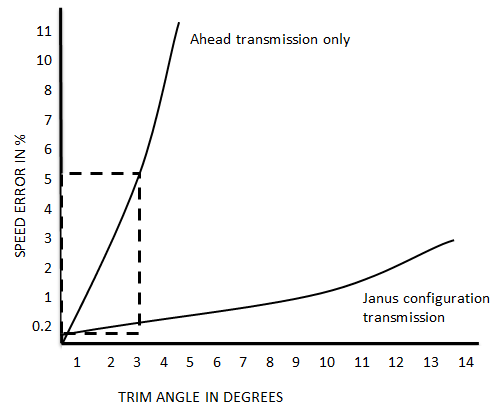
The
advantage of having a Janus configuration over a single transducer arrangement.
It can be seen that a 3O change of trim on a vessel in a forward
pointing Doppler system will produce a 5 % velocity error. With a Janus
configuration transducer system, the error is reduced to 0.2% but is not fully
eliminated.
The addition of a
second transducer assembly set at right angles to the first one, enables dual
axis speed (longitudinal speed and transverse speed) to be indicated.
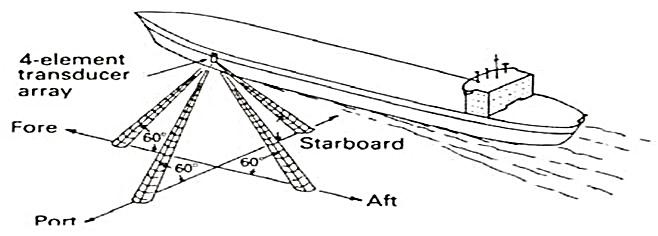
Docking Operation:
The placing of the Janus configuration in a fore and aft direction is known as a single axis system and is used to calculate speed over ground in the forward and after direction. A dual axis system places a second grouping of Janus configured transducers in an athwart ships direction allowing for the calculation of a vessel’s speed when moving sideways through the water, as in docking. The beam width of the athwart ship installation is about 8 degrees to account for the possibility of a vessel’s rolling.
The Doppler system calculates speed to within an accuracy of about 0.5 percent of the distance traveled. It functions well for all speeds that modern vessels can attain and works from a minimum depth of about 1.5 feet to a maximum depth of about 600 feet. Frequencies employed are between 100 kHz and 600 kHz. There are primarily four errors to be aware of when using the Doppler system:
Transducer orientation error caused when the pitching or rolling of the vessel becomes excessive.
Vessel motion error caused by excessive vibration of the vessel as it moves through the water.
Velocity of sound errors due to changes in water temperature or density due to salinity and particle content.
Signal loss errors caused by attenuation of the vibrations during transit through the water or upon reflection from the bottom.
The Doppler system normally measures speed over ground to about 600 feet. This depth signals may be returned by a dense, colder layer of water located throughout the oceans called the deep scattering layer (DSL). Signals received off the DSL are not as accurate as signals received from bottom reflections but can still be used to provide an indication of speed through the water instead of speed over ground when bottom tracking. Your unit may have a manual or automatic system which will switch from bottom tracking to water tracking at increased depth.
The Doppler system can be connected with other electronic navigation systems providing generally accurate speed input. The navigator should be cautioned that precise speed should be determined not only by using the Doppler but also from careful calculations of distances between accurate navigational fixes.
Errors in a Doppler log & how are some of these errors overcome by the Janus Configuration:
ERRORS OF DOPPLER LOG:- The Log speed indicated is subject to various errors, spanning installation, equipment, data processing, varying propagation conditions and sea conditions.
Error in transducer orientation:- The transducers should make a perfect angle of 60° with respect to the keel or else the speed indicated will be inaccurate.
Error in oscillator frequency:- The frequency generated by the oscillator must be accurate and constant. Any deviation in the frequency will result in the speed showing in error.
Error in propagation:- The velocity of the acoustic wave at a temperature of 16°C and salinity of 3.2% is 1505 m/sec but taken as 1500 m/sec for calculation. This velocity changes with temperature, salinity and pressure. To compensate the error due to temperature change, a thermister is mounted near the transducer and change in velocity of the acoustic wave through the water from the standard value due to the change in sea water temperature is accounted for.
Error in ships’ motion:- During the period of transmission and reception, the ship may have a marginal roll or pitch and thereby the angle of transmission and reception can change and a two degree difference in the angle of transmission and reception can have a 0.10% error in the indicated speed, which is marginal and can be neglected.
Error due to rolling/pitching:- The effect of pitching will cause an error in the forward speed and not the athwartship speed. Similarly, rolling will have an effect on the athwartship speed, not the forward speed.
Actual
speed = Indicated speed/Cosß
Error due to inaccuracy in measurement of frequency:- The difference
in the frequencies received by the forward and aft transducers must be measured
accurately. Any error in this will be directly reflected in the speed of the
vessel.
Error due to side lobe:- When the side
lobe reception dominates over the main beam reception, there will be an error
in the speed indicated. The error is more pronounced on a sloping bottom as the
side lobe is reflected at a more favourable angle and will have path length
less than the main beam. This error can be eliminated with the help of the
Janus configuration and to reduce this error, the beam of the transmitted
acoustic wave is reduced.
THE ‘SPEED’ FORMULA WITH SHIP MOVEMENTS CORRECTION – JANUS CONFIGURATION:-
As the ship moves
forward, she also has an up and down motion in the vertical direction, called
‘heaving’. The vertical motion component is v sin α.
As this movement of
the ship has an effect on the frequency shift, it should be accounted for. This
is done by installing a second set of transducers (for transmitting and
receiving) in the aft direction at the same angle of 60º. (Refer figure). This
type of installation setup is called Janus Configuration.
The effect of frequency
shift due to vertical motion (the component v sin α ) of the ship gets
cancelled out in Janus Configuration and the resultant ship speed is calculated
by the formulae:
v = c
(Frf – Fra) / 4 Ft cos α
Where,
v= ship’s speed
c= speed of acoustic wave in water
Frf = Freq. of the received wave, from fwd direction
Fra = Freq. of the received wave, from aft direction
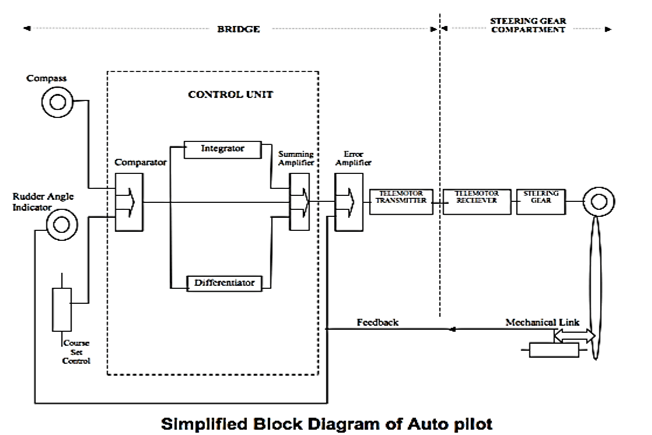
An auto pilot is the ship’s steering controller which automatically manipulates the rudder to decrease the error between the reference heading and actual heading.
Autopilot relieves the helmsman to great extent but definitely autopilot is not a substitute for helmsman.
Autopilot also reduces fuel consumption as the zig-zag course is avoided.
Working of Auto Pilot:-
Course
is selected by the course selector.
Present
heading is indicated by the compass.
The
output from the compass is fed to the comparator in the control unit. The
signal from the course selector is also fed to the comparator.
Difference
between the two signals is causing the output error signal detected by the
comparator.
Integrator
and differentiator also analyze the signal.
The
signals from the comparator, integrator and differentiator are fed to summing
amplifier (control unit).
The
summing amplifier in turn, passes the signals to error amplifier which also
receives feedback from the steering gear.
The
output of error amplifier is transmitted to steering gear via telemotor
transmitter and telemotor receiver.
A
torque motor may be fitted instead of a telemotor.
Controls available in Auto Pilot console:
The Autopilot Control Unit – The PID Control Unit:- In order to maintain the ship’s course accurately, the deviation signal has to be generated under the following conditions:
When the set course is changed (by the navigator).
When the ship deviates from the set course (due to external factors).
For this purpose,
the helm must be provided with data regarding the ship’s movement relative to
the course to steer line.
This is achieved by
electronic circuits with the help of the following:
Proportional
control
Derivative control
Integral control
Proportional
Control:-
Proportional Control – Auto Pilot
The
effect on steering, when only the proportional control is applied, causes the
rudder to move by an amount proportional to the off-course error from the
course to steer.
When
the ship has gone off-course to port, an error occurs and helm, proportional to
the deviation and hence error signal, is used to bring her back to the set
course.
As
the ship starts to return to the set course, the helm is gradually eased and
finally removed when the ship is back on the set course.
The
rudder will be amidships when the ship reaches its set course and then the
heading overshoots resulting in the vessel to go more to starboard. Correcting
helm is now applied causing the ship to return to port and back to the original
course.
The
vessel thus keeps on oscillating to port and starboard of the course line.
Derivative
Control:-
Derivative Control – Auto Pilot
In
derivative control, the rudder is shifted by an amount proportional to the rate
of change of the ship’s deviation from the course. Any deviation of course to
port will cause correcting rudder to be applied to starboard.
As
the rate of change of course decreases, the automatic rudder control decreases
and at a point X, the rudder will return to midships before the vessel reaches
its set course.
The
ship will now make good a course parallel to the required course.
Integral
Control:-
Integral Control – Auto Pilot
Certain errors due to the design of the ship (bow going to port due to transverse thrust, shape of the hull, current draft, etc.) have an impact on the steering capabilities of the ship and have to be corrected for effective overall steering performance.
In order to achieve this, signals are produced by sensing the heading error over a period of time and applying an appropriate degree of permanent helm. The rudder used to correct the course will now be about this permanent helm. That is, the permanent helm will now act as midships.
Additionally, there are various controls provided on the autopilot system along with a filter system for the action of the winds and waves which supply more data to the autopilot which optimizes the performance of integral control.
The output of these three controls is combined and the net resultant thus obtained drives the rudder maintaining the ship on the set course. This type of auto pilot is referred to as PID auto pilot.
Working of “Weather Control”in Auto Pilot System:
Rough weather and hostile sea conditions have adverse effects on the performance of the auto-pilot. Uncontrolled yawing of the ship can result in excessive rudder movement. Modern auto-pilot system has Weather control option in which the system automatically adjusts the setting to adapt to the changing weather and sea conditions. It also provides an option for the user to manual set a specific value.
Working of “Yaw Control” in Auto Pilot System:
The setting of the Yaw Control depends upon the wind and weather condition and their effect on the course keeping ability of the ship, in bad weather this setting should be set high and calm weather this should be set low. If Yaw Control is not set properly, the steering gear will over work & there will be excessive load on the system.
Working of “Off Course Alarm” in Auto Pilot System:
Off Course Alarm:- Usually an Off Course Alarm is fitted on the Autopilot. This can be set for the required amount of degrees. So that if at anytime the difference between the actual course and the Autopilot set course is more than the preset degrees, an alarm will warn the officer.
There is however, one limitation which should be noted. In case, the gyro compass itself begins to wander the Autopilot well steer so as to follow the wandering compass and the Off Course Alarm will not sound. It does not ring unless the difference between the course setting and gyro heading is more than the preset limit.
Working of “Rudder Limit” in Auto Pilot System:
Rudder Limit:- This setting specifies the maximum amount of rudder to be used when correcting the ship’s head or when altering course on autopilot. That is, if a setting of 10O is applied for rudder limit, when altering course the rudder will move to a maximum of 10O. This limit can be varied according to the requirements of the navigator.
Purpose of following settings in Autopilot: Rudder
This
control determines the amount of rudder to be used to correct the slightest
amount deviation from the set course.
The
higher is setting the larger the rudder angle is used to correct a course
deviation and this may result in over correcting.
But
if setting is less, the rudder angle is used to correct deviation may not be
sufficient and will take longer time to return to set course.
This
is proportional controller which transmits a signal which is proportional to
course error
Controller
output = constant (Kp) x Deviation
The
ratio can be changed by settings (i.e. the ratio between instantaneous heading
error and rudder command) also called rudder multiplier.
Lower
setting – Less rudder angle (Long time to return to set Co-Sluggish).
Therefore,
optimum setting required.
Purpose of following settings in Autopilot: Counter Rudder
This control determines the amount of counter action by the rudder to be used to steady the ship on the set course keeping the overshoot to minimum.
Too low setting will allow the ship to overshoot and too high setting will bring the ship back in long time.
This is Derivative control.
Purpose is to apply a relatively greater amount of helm at the beginning of a course alteration to get the ship turning. Once the ship is turning, just enough helm is applied in order to keep her coming around. When new heading is approached, opposite helm is applied to stop the swing. As the ship settles on new heading and the yaw rate disappears, the helm is removed.
Produces an output when course of vessel is changing.
Depends on rate of change of course:
Controller output = constant ( KD ) x change of error / time
Determines amount of counter rudder to steady the ship on set course.
Keeps over shoot to minimum.
Greater the ship’s inertia, greater the setting required. If ship has good dynamic stability, relatively small settings of counter rudder will be sufficient. If the ship is unstable, higher settings will be required.
Depends on ship’s characteristics, loaded/ballast conditions and rate of turn.
Too high setting will bring the ship to set Co slowly.
Too low setting allows overshoot.
As counter rudder settings increase, counter rudder increases.
KD – Counter rudder time constant (Calibration done at sea trial to set KD).
Purpose of following settings in Autopilot: Constant Helm
Constant / Permanent Helm:
This
is integral controller. (In NFU this control is out of action).
When
ship has known imbalance to one side, requiring a certain amount of bias helm
(e.g. TT of propeller) manual setting of the approximate bias speed up the
effect of the AUTOMATIC PERMANENT HELM calculator, because it started off
nearer to its target.
Whether
the control setting is estimated correctly or left at zero has no effect on the
final steering accuracy but only in the time it takes to reach this heading
accuracy.
If
not used as described above , the permanent helm should be left at ZERO and the
automatic permanent helm will function normally.
Produces
output as long a course error persists.
Used
when beam winds; couple formed causing ship to turn into wind.
Rudder
position required to counteract is permanent helm.
Continuous
control calibrated from 20 (P) to 20 (S).
Purpose of following settings in Autopilot: Weather
The setting of the yaw control depends upon the wind and weather condition and their effect on course keeping ability of the ship in bad weather this setting should be set high and calm weather this should be low.
Purpose of following settings in Autopilot: Rudder Limit
Rudder limit: This control specifies the maximum amount of rudder to be used, when correcting the ship’s head or altering the ship’s course.
Auto Pilot should not be used in the following conditions:
A freely suspended Magnet in a Magnetic Compass points towards the North:
Earth’s Magnetic Poles
A magnetic compass works because the Earth is like a giant magnet, surrounded by a huge magnetic field. The Earth has two magnetic poles which lie near the North and South poles. The magnetic field of the Earth causes a magnetized ‘needle’ of iron or steel to swing into a north-south position if it is hung from a thread, or if it is stuck through a straw or piece of wood floating in a bowl of water.
A compass works by utilizing the Earth’s magnetism in order to find directions. Its invention enabled people to perform navigation over long distances, opening up the sea for exploration
A compass points north because all magnets have two poles, a north pole and a south pole, and the north pole of one magnet is attracted to the south pole of another magnet.
The Earth is a magnet that can interact with other magnets in this way, so the north end of a compass magnet is drawn to align with the Earth’s magnetic field. Because the Earth’s magnetic North Pole attracts the “north” ends of other magnets, it is technically the “South Pole” of our planet’s magnetic field.
Notes on Earth’s Magnetism:
Earth’s magnetic field, also known as the geomagnetic field, is the magnetic field that extends from the Earth’s interior to where it meets the solar wind, a stream of charged particles emanating from the Sun.
Its magnitude at the Earth’s surface ranges from 25 to 65 microtesla (0.25 to 0.65 gauss). Roughly speaking it is the field of a magnetic dipole currently tilted at an angle of about 10 degrees with respect to Earth’s rotational axis, as if there were a bar magnet placed at that angle at the center of the Earth.
Unlike a bar magnet, however, Earth’s magnetic field changes over time because it is generated by a geodynamo (in Earth’s case, the motion of molten iron alloys in its outer core).
The North and South magnetic poles wander widely, but sufficiently slowly for ordinary compasses to remain useful for navigation.
However, at irregular intervals averaging several hundred thousand years, the Earth’s field reverses and the North and South Magnetic Poles relatively abruptly switch places.
These reversals of the geomagnetic poles leave a record in rocks that are of value to paleomagnetists in calculating geomagnetic fields in the past. Such information in turn is helpful in studying the motions of continents and ocean floors in the process of plate tectonics.
‘Variation’ and ‘Deviation’ of Magnetic Compass:
VARIATION:
Variation of Magnetic Compass
The true North Pole
and the magnetic north pole are not located at the same spot. This variation
causes a magnetic compass needle to point more or less away from true north.
The amount the needle is offset is called variation because the amount varies
at different points on Earth’s surface. Even in the same locality variation
usually does not remain constant, but increases or decreases at a certain known
rate annually.
The variation for
any given locality, together with the amount of annual increase or decrease, is
shown on the compass rose of the chart for that particular locality.
DEVIATION:
Deviation of Magnetic Compass
The amount a magnetic compass needle is deflected by magnetic material in the ship is called deviation.
Although deviation remains a constant for any given compass heading, it is not the same on all headings. Deviation gradually increases, decreases, increases, and decreases again as the ship goes through an entire 360° of swing.
The magnetic steering compass is located in the pilothouse, where it is affected considerably by deviation. Usually the standard compass is topside, where the magnetic forces producing deviation are not as strong.
Courses and bearings by these compasses must be carefully differentiated by the abbreviations PSC (per standard compass), PSTGC (per steering compass), and PGC (per gyrocompass).
The standard compass provides a means for checking the steering compass and the gyrocompass.
Notes on Ship’s Magnetism:
On a ship built up of wood, a magnetic compass would point to magnetic north knowing the variation at that place, the magnetic direction corrected and the true direction obtained, the ships built up of steel structures is of two types, soft iron magnetism and the hard iron magnetism.
Soft iron magnetism is the induced magnetism and hard iron magnetism is the permanent magnetism.
Sketch & label a wet card Magnetic Compass:
Wet Card Magnetic Compass
Necessity:- The dry card compass is too sensitive for steering purposes, especially in bad weather. Even small disturbances cause the dry card to oscillate. In the wet card compass oscillations are damped, without loss of accuracy, by immersing the card in a liquid. The card therefore has a ‘dead beat’ movement.
The card:- The wet card is made of mica and is only about 15 cm in diameter. The card is attached to nickel- silver float chamber that has a sapphire cap. The cap rests on iridium tipped pivot. The sapphire has a polishing effect on the iridium tip. This arrangement is practically frictionless.
The directive element:- In modern wet card compasses the directive element is a ring magnet fitted around the base of the float. The ring magnet offers less resistance to movement and causes less turbulence.
The bowl:- The diameter of the bowl is about 23 cm in order to reduce disturbances caused by turbulence in the liquid during rotation of the card. The top of the bowl is of transparent glass. The bottom is of frosted glass.
Allowance for expansion:- One method is to have a small accordion – like expansion chamber attached to the bowl. The chamber increases or decreases in volume, as necessary, as the liquid in the bowl expands or contracts due to changes in atmospheric temperature.
Suspension:- The bowl of the wet card compass is suspended by gimbals. This bowl, being considerably heavier than that of the dry card compass, does not have a glass hemisphere of alcohol and water attached to its underside. Instead, a ballast weight consisting of a ring of lead, enclosed in brass, is attached along with circumference of the underside of the bowl to bring its centre of gravity below the gimbals.
Care and Maintenance:- The care and maintenance required for a wet card compass and its binnacle is the same as that for a dry card compass. The only changes / differences are:-
The wet compass card, if found defective owing to stickiness of movement, has to be renewed by the manufacturer or his authorized agent. Hence, no spare wet card is carried. Instead, an entire bowl is carried as a spare.
In rare cases, a bubble may develop in the wet compass bowl. This has to be removed at the earliest opportunity.
Correctors on a compass binnacle and why are they required, various corrections to be applied to magnetic compass
The Binnacle – Magnetic Compass
The Binnacle:- The binnacle is a cylindrical container made of teak wood and brass. No magnetic materials are used in its construction. Even the screws are of brass and the nails, copper. The compass bowl is slung inside the top portion of the binnacle. The middle potion is accessible by a door and contains an electric bulb. Light from this bulk passes upwards through a slot, through an orange coloured glass fitted over the slot, through the bottom of the compass bowl, to illuminate the compass card from below. The orange colour ensures that the night vision of the observer is not adversely affected.
Corrector Magnets:- (See Figure) In the centre of the lower half of the binnacle, there are a number of horizontal holes, both fore & aft and athwartships, for ‘hard iron’ or ‘permanent’ corrector magnets which are meant to offset undesirable, disturbing, magnetic effects caused by the ship’s steel hull. The lower two-thirds of the binnacle has a vertical brass tube, at the centre, in which slides a ‘bucket’. This bucket has some magnets in it called ‘heeling error correctors’. The bucket is held in position by a brass chain.
Quadrantal
Correctors:-
(See Figure) These are two ‘soft iron’ spheres which are fitted in brackets,
one on either side of the binnacle. The brackets are slotted so that the
distance between the spheres can be altered as desired during compass
adjustment.
Flinders Bar:- (See Figure)
This is a soft iron corrector, (diameter about 7.5 to 10 cm) inserted in a 60
cm long brass case, fitted vertically on the forward or on the after part of
the binnacle. If the ship has more
superstructure abaft the compass, the Flinders bar is fitted on the forward
part of the binnacle and vice versa.
Remove an air bubble from the compass bowl
Removal of bubble: A bubble may form in the bowl owing to the fact that some of the liquid has somehow escaped from the bowl. This is a rare occurrence and must be remedied by following the manufacturer’s instructions. In most compasses:
Tilt the bowl until
the ‘filter hole’ comes uppermost. This hole is provided on the side of the
bowl.
Unscrew the stud/
screw provided.
Top up with ethyl
alcohol. If this is not available, distilled water would do.
Screw the stud/
screw back into place.
Gently let the bowl
return to upright.
In some modern compasses, small bubbles may be
removed as follows:-
Invert the bowl gently. This would cause the
bubble to enter a bubble trap provided for this purposes.
Gently return the bowl to upright.
The bubble should have disappeared.
Advantages of wet compass over Dry Compass Card
The dry card compass is generally used as a standard compass & the wet card compass as a steering compass. The dry card compass is very sensitive. Even a slight disturbance makes the dry card oscillate. In the wet card compass, the oscillation is damped in the liquid and hence more useful as a steering compass. In some ships, the wet compass is now used as a standard compass, mainly because of the availability of the gyro compass as the main direction indicating instrument.
Why the vessel is required to be swung once in a year to verify Magnetic Compass Deviation Card?
Explanation:-
Swinging the compass, or swinging the ship (as the operation is sometimes more accurately called as the ship swings around the compass card which, ideally, remains pointing north), involves taking the vessel to a suitable location in open water with plenty of room for maneuvering. With the vessel steady on each of the eight primary compass points, existing compass headings or bearings are compared with what we know the actual magnetic headings or bearings should be, the difference being the deviation.
During the process, any magnetic fields, created by the ship’s structure, equipment, etc, which cause the compass to deviate are reduced or, if possible, eliminated, by creating equal but opposite magnetic fields using compensating correctors. These are placed inside the compass binnacle or adjacent to the compass:
Magnets are aligned fore and aft and athwartships to create horizontal magnetic fields to compensate for the permanent horizontal components of the ship’s magnetism.
Soft iron correcting spheres or plates and the Flinders bar compensate for the induced magnetism caused by the effect the earth’s magnetic field has on the ship’s magnetism.
Heeling error magnets compensate for the vertical component of the ship’s magnetism.
The timing and logistics of this operation are often governed by the tide, the weather and other vessels in the vicinity. The time it takes to swing and adjust the compass is also influenced by the condition and accessibility of the compass and correctors, the manoeuvrability of the vessel, the skill of the helmsman and the complexity of, and reasons for, the deviating magnetic fields involved.
On successful completion of compass swing, a table recording any remaining residual deviation and a statement as to the good working order of the compass will be issued. A current deviation card / certificate of adjustment is a legal requirement on all sea going commercial vessels.
Deviation can be determined by a number of methods: the sun’s azimuth or known bearings of distant objects, such as a mountain peak or lighthouse are considered most accurate. In certain circumstances, such as poor visibilty, calibration is carried out by making comparisons with other navigation instruments, such as a gyro or GPS compass.
Using other navigation instruments to find deviation is only satisfactory if the absolute accuracy of these instruments has first been verified, or any known error is factored into the calculations. Most professionals prefer something tangible, such as a fixed landmark, with a known position and bearing to work with.
What is Dip? How compass is kept horizontal in varying latitudes?
Magnetic dip Error:-
Magnetic Dip error
Magnetic dip is the tendency of the compass needles to point down as well as to the magnetic pole.
Dip is greatest near the poles and least near the Magnetic Equator.
The compass card is designed to operate in the horizontal, therefore, any movement from the horizontal plane introduces dip error.
The needle of your magnetic compass will be parallel with Earth’s surface at the Magnetic Equator, but will point increasing downward as it is moved closer to the Magnetic Pole.
Northerly turning error is due to the mounting of the compass. Since the card is balanced in fluid, when the vessel turns, the card is also banked as a result of centrifugal force.
While the card is banked, the vertical component of the Earth’s magnetic field causes the north-seeking ends of the compass to dip to the low side of the turn. When making a turn from a northerly heading, the compass briefly gives an indication of a turn in the opposite direction.
When making a turn from the south, it gives an indication of a turn in the correct direction but at a faster rate.